КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Построение имитационных моделей методом электроаналогий
|
|
|
|
Рассмотрим методику построения математических моделей методом электроаналогий на примере механизма с одной степенью свободы (рис. 6.12) [16], [17].
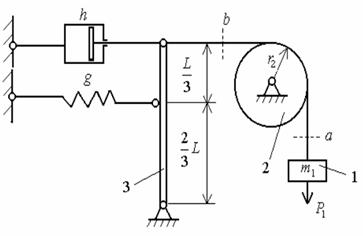
Рис. 6.12. Механизм с одной степенью свободы
Разделим систему на отдельные подсистемы, придерживаясь следующих правил:
1) Систему разделяют на подсистемы так, чтобы каждая подсистема содержала одну сосредоточенную массу. Количество подсистем должно быть равно числу
сосредоточенных масс механического устройства.
2) Векторы внутренних сил в каждой паре взаимодействующих подсистем обозначают одинаковыми символами, но направляют векторы этих сил на кинематических схемах взаимодействующих подсистем противоположно.
3) За положительное направление сил, скоростей и ускорений принимается направление движения сосредоточенной массы в первоначальный момент времени t=0. Скорости движений могут быть линейными или угловыми. Сочетания линейных и угловых скоростей (плоские движения твердых тел) раскладываются отдельно на линейные скорости и на угловые скорости.
4) Для обозначения сил и моментов, действующих в системе, рекомендуется использовать следующие символы:
a) точки разрыва внутренних связей в системе обозначают буквами a, b, c, … и т.д;
б) внутренние силы в точках разрыва связей обозначают большими буквами с соответствующими нижними индексами. Например, Ra, Rb,..., Rc и т.д.;
в) моменты от сил, действующих на звено, обозначают большими буквами с верхним и нижним индексами.
Например,  ,
,  или
или  ,
,  , где верхний индекс означает силу, а нижний – номер звена, к которому приложена эта сила.
, где верхний индекс означает силу, а нижний – номер звена, к которому приложена эта сила.
В результате для рассматриваемого примера получаем три подсистемы.
Подсистема 1 (рис.6.13, а)
Включает подвешенное на нити тело массой m1. На него действует внешняя сила – сила веса P1, под действием которого тело движется вниз со скоростью V1. Силами сопротивления здесь являются инерционная сила  и сила натяжения нити Ra (внутренняя сила).
и сила натяжения нити Ra (внутренняя сила).
|
|
|
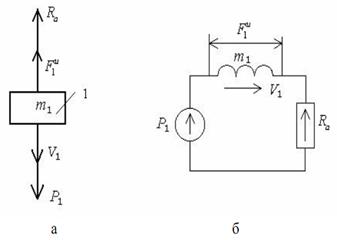
Рис. 6.13. Подсистема 1:
а – кинематическая схема, б – электрическая схема
Составим уравнение равновесия указанных выше сил:
 (6.4)
(6.4)
Оно служит основой для построения эквивалентной электрической схемы (рис.6.13, б). Эквивалентные электрические схемы конструируют по следующим правилам:
1) внешние движущие силы представляют на электрической схеме в виде источников э. д. с.;
2) внутренним силам (силам сопротивления), действующим на отдельную сосредоточенную массу, отвечают напряжения между определенными точками электрической схемы. Чтобы показать полярность каждого из этих напряжений, к
соответствующим двум точкам электрической схемы присоединяют прямоугольник, внутри которого изображают стрелку, обращенную к точке с положительным потенциалом;
3) скорость движения сосредоточенной массы эквивалентна току в цепи с индуктивностью;
4) скорость деформации упругого элемента эквивалентна току в цепи с емкостью;
5) скорость движения демпфирующего элемента эквивалентна току в цепи с активным сопротивлением;
6) индуктивности, конденсаторы, сопротивления, э. д. с., напряжения и токи на электрической схеме обозначают с помощью соответствующих символов, принятых в механике.
Подсистема 2 (рис. 6.14, а)
Состоит из колеса с моментом инерции J2. Сила натяжения вертикальной части нити Ra создает на колесе 2 вращающий момент и приводит его в движение с угловой скоростью ω2. По отношению к звену 2 это движущая сила. Инерционный момент  и сила натяжения горизонтальной части нити Rb препятствуют вращению колеса и, следовательно, являются силами сопротивления.
и сила натяжения горизонтальной части нити Rb препятствуют вращению колеса и, следовательно, являются силами сопротивления.
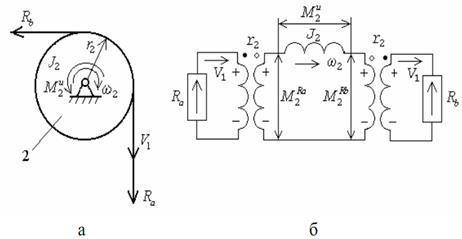
Рис.6.14. Подсистема 2:
а – кинематическая схема, б – электрическая схема
|
|
|
Запишем уравнение равновесия моментов, действующих на звено 2:
 (6.5)
(6.5)
где  ,
,  .
.
Этим уравнениям отвечает эквивалентная электрическая схема на рис. 6.14, б. Чтобы выполнить содержащиеся в последних выражениях операции умножения, в электрической схеме применены два трансформатора. Трансформаторы на электрических схемах изображают по следующим правилам:
1) возле изображения трансформатора должны быть указаны полярности напряжений на первичной и на вторичной обмотках и направления токов через эти обмотки в начальный момент времени t = 0;
2) начало первичной обмотки каждого трансформатора отмечают на электрической схеме черной точкой, а начало вторичной обмотки – прозрачной точкой. Токи в этих обмотках должны быть направлены в противоположные стороны. Так, например, если ток в первичной обмотке «втекает в точку», то во вторичной обмотке ток должен «вытекать из точки»;
3) для всех трансформаторов указывают коэффициенты передач. Они могут быть постоянными и переменными, безразмерными или иметь размерности физических величин.
Подсистема 3 (рис. 6.15, а)
Включает в себя рычаг 3, который под влиянием движущей силы F2 совершает вращательное движение ω3. Силами сопротивления движению являются инерционный момент M и 3, усилие демпфера Fd и усилие пружины Fy.
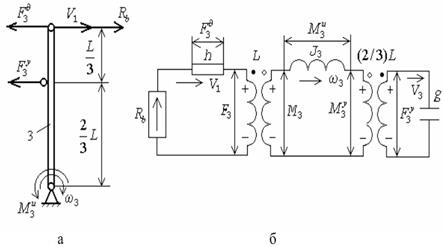
Рис. 6.15. Подсистема 3:
а – кинематическая схема, б – электрическая схема
Запишем уравнение равновесия моментов, действующих на звено 3:
 (6.6)
(6.6)
Где 
 , где, в свою очередь,
, где, в свою очередь,  .
.
Последние уравнения использованы для построения эквивалентной электрической схемы (рис. 6.15, б). Содержащиеся в ней трансформаторы осуществляют операции умножения. Далее объединяем отдельные электрические схемы в единую
схему замещения. Прямоугольники с обозначениями напряжений Ra и Rb рассматриваем теперь как две части электрического биполярного разъема (рис.6.16), причем направления стрелок внутри прямоугольников соответствуют полярности э.д.с. на контактах разъема.
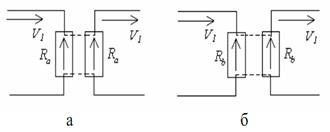
Рис.6.16. Соединения подсистем:
а – первой со второй; б – второй с третьей
Непосредственно из схем разъемных соединений следуют очевидные правила:
1. токи, протекающие через две одноименные части разъема равны между собой по модулю;
|
|
|
2. направления токов, протекающих через две одноименные части разъема, противоположны по отношению к э.д.с. на контактах разъема. Это означает, что если в правой части разъема ток «втекает в стрелку», то в левой части разъема он вытекает из «стрелки», и наоборот (рис.6.16).
Общая электрическая схема замещения (рис 6.17) содержит четыре контура и четыре трансформатора.
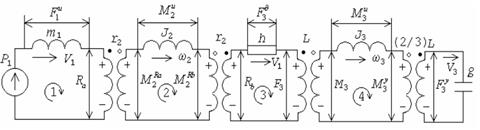
Рис. 6.17. Общая электрическая схема замещения
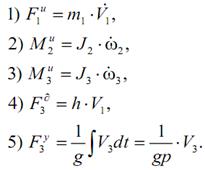
Уравнения Кирхгофа для контуров 1-4 совпадают с уравнениями сил и моментов (6.4–6.6). Записываем уравнения трансформаторов, куда включаем соотношения напряжений, токов и скоростей изменений токов.

Компонентные уравнения инерционных, диссипативных и упругих элементов:
Далее строим сеть связей физических величин (рис. 6.18). Эту работу следует выполнять, соблюдая следующие правила:
1. В уравнениях Кирхгофа для контуров можно выносить вправо от знака равенства только напряжения на индуктивностях и на активных сопротивлениях, а также напряжения, соответствующие неизвестным внутренним силам или моментам. Напряжения на емкостях выносить вправо от знака равенства нельзя.
2. Если инерционное звено соединено с другими звеньями упругими связями, то в уравнении Кирхгофа напряжение на индуктивности, эквивалентной рассматриваемому инерционному звену, всегда выносят вправо от знака равенства.
3. Если два или более инерционных звена соединены жесткой кинематической связью, то из этой группы звеньев надо выбрать одно ведущее звено. Соответственно в уравнениях Кирхгофа надо вынести вправо от знака равенства только то напряжение, которое эквивалентно инерционной силе на ведущем звене.
Напряжения на остальных инерционных звеньях рассматриваемой группы выносить вправо от знака равенства нельзя.
4. Чтобы определить напряжение на конденсаторе, надо знать протекающий через него ток.
5. Напряжение на активном сопротивлении можно определить с помощью тока, протекающего через это сопротивление, или из уравнения Кирхгофа для соответствующего контура.
6. Напряжение на индуктивности можно определить с помощью уравнения Кирхгофа для контура, содержащего эту индуктивность, или с помощью производной от тока через индуктивность.
|
|
|
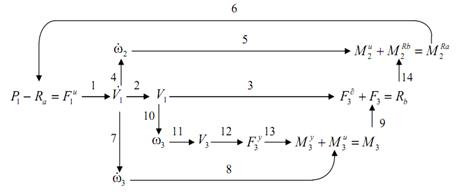
Рис. 6.18. Сеть связей
Таблица 6.5
Передаточные функции элементарных звеньев

Чтобы перейти от сети связей к структурной схеме динамической системы, записываем передаточные функции элементарных звеньев (табл. 6.5) и заменяем в сети связей ветви на передаточные функции этих звеньев.
Общая структурная схема (рис.6.19) содержит два интегрирующих звена.
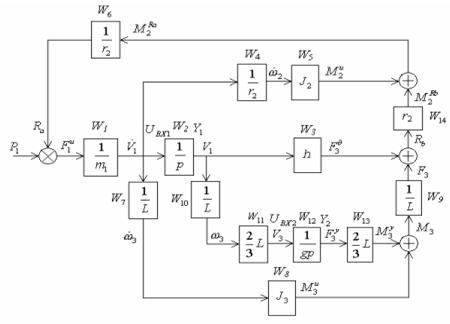
Рис. 6.19. Общая структурная схема
Дифференциальные уравнения этих звеньев имеют следующий вид:
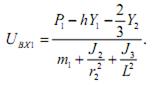
Записываем уравнение связи для первого интегрирующего звена.

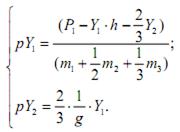
Раскрывая скобки и решая данное уравнение относительно UBX1, получаем:
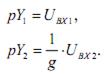
Уравнение связи для второго интегрирующего звена имеет следующий вид:

Подставляя выражения BX1 U и BX 2 U в дифференциальные уравнения интегрирующих звеньев и полагая
получаем общую систему дифференциальных уравнений математической модели в форме Коши:
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 947; Нарушение авторских прав?; Мы поможем в написании вашей работы!