КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Устойчивый объект
|
|
|
|
Исследование объекта первого порядка, заданного апериодическим звеном.
Пример выполнения работы
Дано:
 ,
,  ,
,  ,
,  .
.
Рассмотрим объект первого порядка, описываемый уравнением
 ,
,  (1)
(1)
Структурная схема объекта показана на рисунке 1.
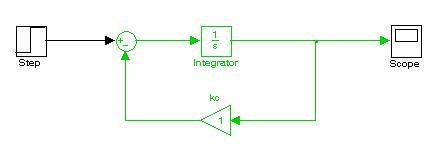
Рисунок 1 - Структурная схема объекта первого порядка
Построим и исследуем объект с  и получим переходный процесс вида (см. рисунок 2), имеющий время регулирования
и получим переходный процесс вида (см. рисунок 2), имеющий время регулирования  .
.
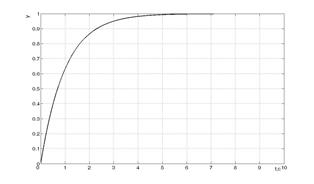
Рисунок 2 - Переходный процесс в объекте первого порядка при  .
.
Построим адаптивное управление объектом (1), задавая желаемые переходные процессы объекта с адаптивным управлением с помощью эталонной модели:
 . (2)
. (2)
Задавая  , сравним траектории эталонной модели (см. рисунок 3,
, сравним траектории эталонной модели (см. рисунок 3,  ) и самого объекта управления.
) и самого объекта управления.
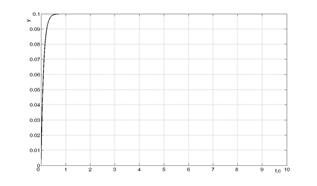
Рисунок 3 - Переходный процесс в эталонном объекте первого порядка при  .
.
Как видно, у эталонной модели время переходного процесса и заданное установившееся значение в 10 раз меньше, чем у объекта.
Построим систему адаптивного управления с параметрической настройкой (без огрубления).
 ; (3)
; (3)
 (4)
(4)
где  ,
,  – настраиваемые коэффициенты адаптивного закона;
– настраиваемые коэффициенты адаптивного закона;  – положительные коэффициенты усилений настроек;
– положительные коэффициенты усилений настроек;  – ошибка – разность между переменными состояния объекта (1) и эталонной модели (2).
– ошибка – разность между переменными состояния объекта (1) и эталонной модели (2).
Проведем исследование адаптивной системы (1)÷(4) при следующих параметрах:
1)  ,
,  ,
,  , $
, $
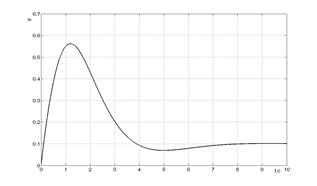
Рисунок 4 - Переходный процесс при 
.
.
.
n) , , Р =1, 
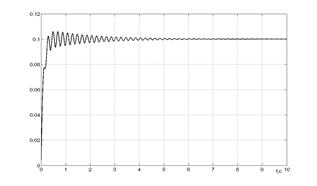
Рисунок n - Переходный процесс при
Для системы , , , установившиеся значения настроек  и
и  по графикам переходных процессов будут:
по графикам переходных процессов будут:  ,
,  . Расчетные значения:
. Расчетные значения:  ,
,  .
.
Рассмотрев переходные процессы, делаем вывод о том, что в устойчивом объекте можно добиться желаемого быстродействия, вводя адаптивное управление с параметрической настройкой. При этом, чем больше коэффициенты усиления  , тем выше колебания, возникающие в системе и меньше перерегулирование, наконец, при значениях больше 10000 наступает момент, когда траектории эталонной модели и объекта управления совпадают, а это значит, что
, тем выше колебания, возникающие в системе и меньше перерегулирование, наконец, при значениях больше 10000 наступает момент, когда траектории эталонной модели и объекта управления совпадают, а это значит, что  и
и  (в чем легко убедится, посмотрев установившиеся значения на выходах настроек адаптивного управления регулятора).
(в чем легко убедится, посмотрев установившиеся значения на выходах настроек адаптивного управления регулятора).
|
|
|
ЗАМЕЧАНИЕ. При равенстве  дифференциальное уравнение настроек для коэффициента
дифференциальное уравнение настроек для коэффициента  можно исключить из рассмотрения адаптивной системы (1)÷(4).
можно исключить из рассмотрения адаптивной системы (1)÷(4).
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 323; Нарушение авторских прав?; Мы поможем в написании вашей работы!