КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 5. Автоматические регуляторы
|
|
|
|
1. ХАРАКТЕРИСТИКИ И СВОЙСТВА ОБЪЕКТОВ РЕГУЛИРОВАНИЯ.
Объект регулирования является основной составной частью автоматической системы, определяющей ее характер. Некоторые свойства объектов благоприятствуют качественному процессу регулирования, другие вредят, поэтому определение характеристик и свойств объектов регулирования является одной из важнейших задач.
Статической характеристикой объекта называется зависимость его выходной величины от входной в установившемся режиме. В общем виде статическая характеристика линейного звена описывается уравнением xBHX = kxBX, где k - коэффициент усиления (передачи) звена, показывающий, во сколько раз изменение выходной величины больше или меньше изменения входной.
Линейная статическая характеристика имеет вид прямой линии и оценивается углом ее наклона а к оси абсцисс. Отношение выходной величины к входной для любой точки линейной характеристики - величина постоянная и выражается через тангенс угла наклона. Статические характеристики часто представляют графически. На рис. 5.1 приведен график статической характеристики линейного звена. По оси абсцисс откладывается значение входной величины, а по оси ординат - выходной.
Большинство реальных элементов, из которых состоит автоматическая система регулирования, нелинейны. Расчет таких систем очень сложен, поэтому для облегчения расчетов прибегают к линеаризации статических характеристик нелинейных звеньев на небольших участках, называемых рабочими. При линеаризации нелинейные уравнения, описывающие статическую характеристику объекта, заменяют линейными.
Статические характеристики определяют экспериментальным путем, а также аналитически. Статические характеристики объекта характеризуют его только в равновесном состоянии. Для характеристики объекта в любом другом состоянии необходимо знать его динамические свойства.
|
|
|
Динамической характеристикой объекта называется зависимость выходной величины во времени в переходном режиме при определенном законе изменения входной величины.
Динамические характеристики включают в себя временные и частотные характеристики. Временная характеристика, или кривая разгон а,- это динамическая характеристика, полученная при однократном мгновенном скачкообразном возмущении. Частотная характеристика показывает зависимость изменения выходной величины от входной, если последняя изменяется по синусоидальному закону.
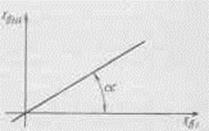
Рис. 5.1 График статической характеристики линейного звена
Динамические характеристики объекта можно определить экспериментально и аналитически, так же как и статические характеристики. При экспериментальном получении кривой разгона регулятор отключается от объекта регулирования и на вход системы вручную наносится единичное ступенчатое воздействие.
Например, в качестве объекта регулирования можно взять жаровню экстракционной установки, работающую с двумя форпрессами и состоящую из шести чанов, расположенных один над другим. В каждом чане находится мешалка. Из нижнего чана мезга по течке поступает в приемные воронки форпрессов. Жаровня обогревается паром, который вводится в днище каждого чана. Внутрь чанов вводится острый пар.
При анализе технологического процесса выяснилось, что в процессе дарения необходимо поддерживать определенную температуру на выходе из жаровни. Этот параметр является основным.
Возмущение процесса по расходу пара на стороне потребления наблюдается на шестом чане. Шестой чан наиболее чувствителен к возмущениям по общему пару. В соответствии с этим динамические характеристики нужно снимать для шестого чана по каналу «расход общего пара - температура в чане». Кривая разгона, полученная при единичном ступенчатом воздействии А (повышение давления пара на коллекторе) в момент времени t0, показана на рис. 5.2. До этого момента система находилась в равновесном состоянии.
|
|
|
По кривой разгона определяют следующие динамические параметры: запаздывание, постоянную времени и коэффициент передачи.
Запаздывание т определяется отрезком времени от момента внесения возмущения до точки пересечения касательной с осью абсцисс, проведенной в точке п, соответствующей максимальной скорости изменения выходной величины.
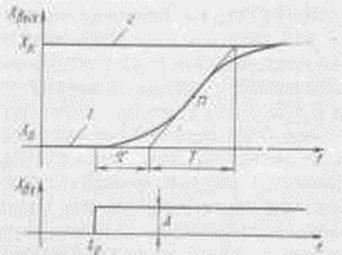
Рис. 5.2 Кривая разгона
Постоянная времени Т - отрезок времени от момента пересечения касательной с линией начального установившегося значения 1 до момента ее пересечения с линией нового установившегося значения 2. Это условное время, в течение которого выходная величина изменилась бы от начального до нового установившегося значения, если бы это изменение происходило с постоянной и максимальной для данного процесса скоростью.
Коэффициент передачи - отношение изменения выходной величины объекта при переходе из начального в новое установившееся состояние к единичному возмущению на входе. Зная коэффициент передачи Лоб (усиления), постоянную времени разгона Т, время запаздывания т, отношение времени запаздывания к постоянной времени разгона т/Г, входную величину Хъи, а также начальное х0 и установившееся хк значения выходной величины, можно подобрать тип регулятора, приближенно определить его настройку, не прибегая к моделированию для каждого объекта.
Несмотря на большое разнообразие объектов регулирования в пищевой промышленности, их различные конструкции и принципы действия, все они имеют ряд общих свойств: обладают емкостью, самовыравниванием, запаздыванием.
Емкость объекта - способность накапливать вещество или энергию, что возможно, когда в регулируемом объекте имеется сопротивление выходу вещества или энергии. Например, если бы не было гидравлического сопротивления сливных труб объектов, в которых регулируется уровень, жидкость не могла бы накапливаться, и сосуд не обладал бы ёмкостью. Если тепловой объект (дистилляционный куб), где регулируется температура, не имел бы тепловой изоляции, то тепловая ёмкость не создавалась бы вследствие рассеивания всего тепла.
|
|
|
В зависимости от числа ёмкостей различают одно-, двух- и многоёмкостные объекты регулирования. Одноёмкостный объект состоит из одного сопротивления и одной емкости. Двух- и многоёмкостные объекты состоят из двух или более емкостей, участвующих в процессе регулирования и разделенных переходными сопротивлениями. Большинство промышленных объектов регулирования являются многоёмкостными. Объекты, обладающие ёмкостями, изображены на рис. 5.3.
Одноемкостный объект (рис. 5.3, а) - это теплообменник смешения, в котором температура потока воды QB регулируется изменением подачи водяного пара Qn. Здесь емкостью является общая теплоемкость жидкости, а сопротивлением - гидравлическое сопротивление трубы на выходе. Двухъёмкостный объект (рис. 5.3, б) - трубчатый теплообменник, где по трубам протекает вода, а в межтрубном пространстве - пар. Здесь тепловыми емкостями являются пар в межтрубном пространстве и жидкость в трубах. Сопротивлением является термическое сопротивление металла труб и трубных решеток. Многоёмкостный объект (рис. 5.3, в)-ректификационная колонна; число емкостей определяется числом тарелок. В многоемкостных объектах различают емкости на входе и выходе (или на стороне подачи и потребления).
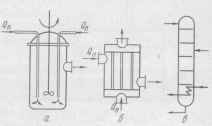
Рис. 5.3. Схемы объектов, обладающих емкостью:
а - одноёмкостный; б - двухъёмкостный; в - многоёмкостный
Мерой ёмкости объекта служит коэффициент ёмкости - количество вещества или энергии, которое необходимо подвести к объекту или отвести от объекта, чтобы изменить величину регулируемого параметра на единицу. Так, для объекта, где регулируется температура, коэффициентом ёмкости будет то количество тепла, которое необходимо ввести в объект, чтобы температура регулируемой среды повысилась на 1 °С. Чем больше коэффициент ёмкости объекта, тем меньше изменяется регулируемый параметр при одном и том же изменении количества подаваемого продукта. Следовательно, легче поддаются регулированию объекты, имеющие большой коэффициент ёмкости.
|
|
|
Самовыравнивание - способность объекта регулирования после нарушения равновесного состояния без вмешательства автоматического управляющего устройства приходить в новое установившееся состояние. Равновесное состояние при постоянной нагрузке может быть нарушено изменением притока или расхода вещества или энергии, т. е. нанесением возмущающих воздействий. Объекты, обладающие свойством самовыравнивания, называются устойчивыми, или статическими, а не обладающие - нейтральными, или астатическими.
Рассмотрим объект с самовыравниванием (рис. 5.4). В бак 2 через вентиль 1 поступает вода в количестве Qi; из бака вода вытекает через вентиль 3. Если вентили открыты в определенном положении, то приток остается постоянным, а расход будет переменным, зависящим от уровня воды в баке. Это объясняется тем, что при повышении уровня воды в баке нижний слой воды будет находиться под увеличивающимся напором, поэтому будет увеличиваться и расход Q2. Предположим, что имеется баланс (равенство) расхода и притока, тогда уровень Н0 остается неизменным. Если увеличить степень открытия вентиля /, то приток Qx увеличится, баланс нарушится, и уровень воды начнет повышаться. Однако с увеличением гидростатического напора (уровня) Н будет увеличиваться и расход Q2. Поскольку приток Q теперь будет неизменным, а расход Q2 будет возрастать, разность Qi-Q2 начнет постепенно уменьшаться, а уровень воды в баке будет стремиться к новому установившемуся значению.
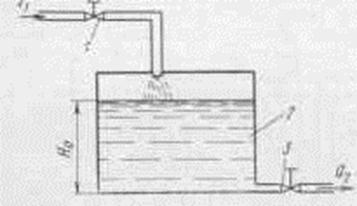
Рис. 5.4. Объект регулирования уровня с самовыравниванием
Таким образом, при увеличении притока Qx расход Q2 (зависит от напора) будет принимать такое значение, которое будет соответствовать новому установившемуся состоянию, т. е. рассмотренный объект обладает самовыравниванием.
Если вместо вентиля 3 в рассмотренном примере установить насос, который будет работать с постоянной скоростью, т. е. с постоянным расходом (Q2 = const), то в этом случае объект не будет обладать самовыравниванием.
Действительно, если приток увеличить, то увеличится регулируемая величина (напор Я), а расход Q2 останется неизменным и объект сам не увеличит расход. Чтобы между новым притоком и новым расходом было соответствие, нужно увеличить скорость подачи (притока) воды насосом, что можно сделать только при помощи автоматического управляющего устройства или вручную; объект же сам этого сделать не может, так как производительность насоса не зависит от уровня воды (напора). Следовательно, такой объект является объектом без самовыравнивания - астатическим объектом.
В автоматических системах регулирования между моментом нарушения равновесия и началом изменения регулируемого параметра проходит некоторое время, затрудняющее управление процессом. Это запаздывание объясняется инерционностью системы и наличием сопротивлений. Различают запаздывания переходное, или ёмкостное, и чистое, или транспортное.
Переходное (ёмкостное) запаздывание т характерно для многоёмкостных объектов. Величина этого запаздывания возрастает с увеличением числа ёмкостей и возникает при преодолении потоком вещества или энергии сопротивлений, разделяющих гидравлические, тепловые и другие ёмкости объекта. В процессе эксплуатации объектов величины ёмкостного запаздывания могут значительно возрастать. Например, в теплообменных аппаратах это вызывается в основном загрязнением поверхностей теплообмена, в гидравлических системах - загрязнением или засорением вентилей и труб, соединяющих аппараты, в насадочных аппаратах колонного типа - загрязнением, замораживанием и обвалом насадки.
Чистое (транспортное) запаздывание - время (тч) от момента внесения возмущающего воздействия до начала изменения регулируемого параметра. Это время необходимо для того, чтобы поток вещества или энергии, обладающий скоростью v, прошел расстояние l от места внесения возмущающего воздействия до места, в котором измеряется значение регулируемого параметра, т. е. x4=l/v.
Минимальным чистым запаздыванием обладает объект, работающий при максимальной нагрузке, или объект, через который сигнал распространяется с большой скоростью. Например, изменение давления или скорости потока жидкости, полностью заполняющей гидравлическую систему, распространяется настолько быстро, что чистое запаздывание мало (за исключением длинных трубопроводов).
Общее запаздывание т0б в объекте регулирования равно сумме емкостного (т) и чистого (тч) запаздывания: т0б = т + тч.
Запаздывания всегда неблагоприятно влияют на качество регулирования, поэтому следует стремиться к их возможному уменьшению. Этого можно достичь:
- применением малоинерцион-ных чувствительных элементов,
-выбором рациональных конструкций объектов регулирования,
-размещением измерительных элементов и регулирующих органов как можно ближе к регулируемым объектам,
-медленным изменением нагрузки (возмущением) объекта регулирования, чтобы система регулирования плавно переходила на новый режим работы.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 1592; Нарушение авторских прав?; Мы поможем в написании вашей работы!