КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Гусеничный ход
|
|
|
|
Тележка состоит из ходовой рамы 24 (рис. 49), редукторов 1 и 6 привода правой и левой гусениц, механизмов натяжения 19, опорных 16 и поддерживающих 9 катков, гусениц 27 и гидроразводки тележки, включающей в себя коллектор 8, блок клапанов 5 и трубопроводы, соединяющие его с узлами и агрегатами гидроразводки.
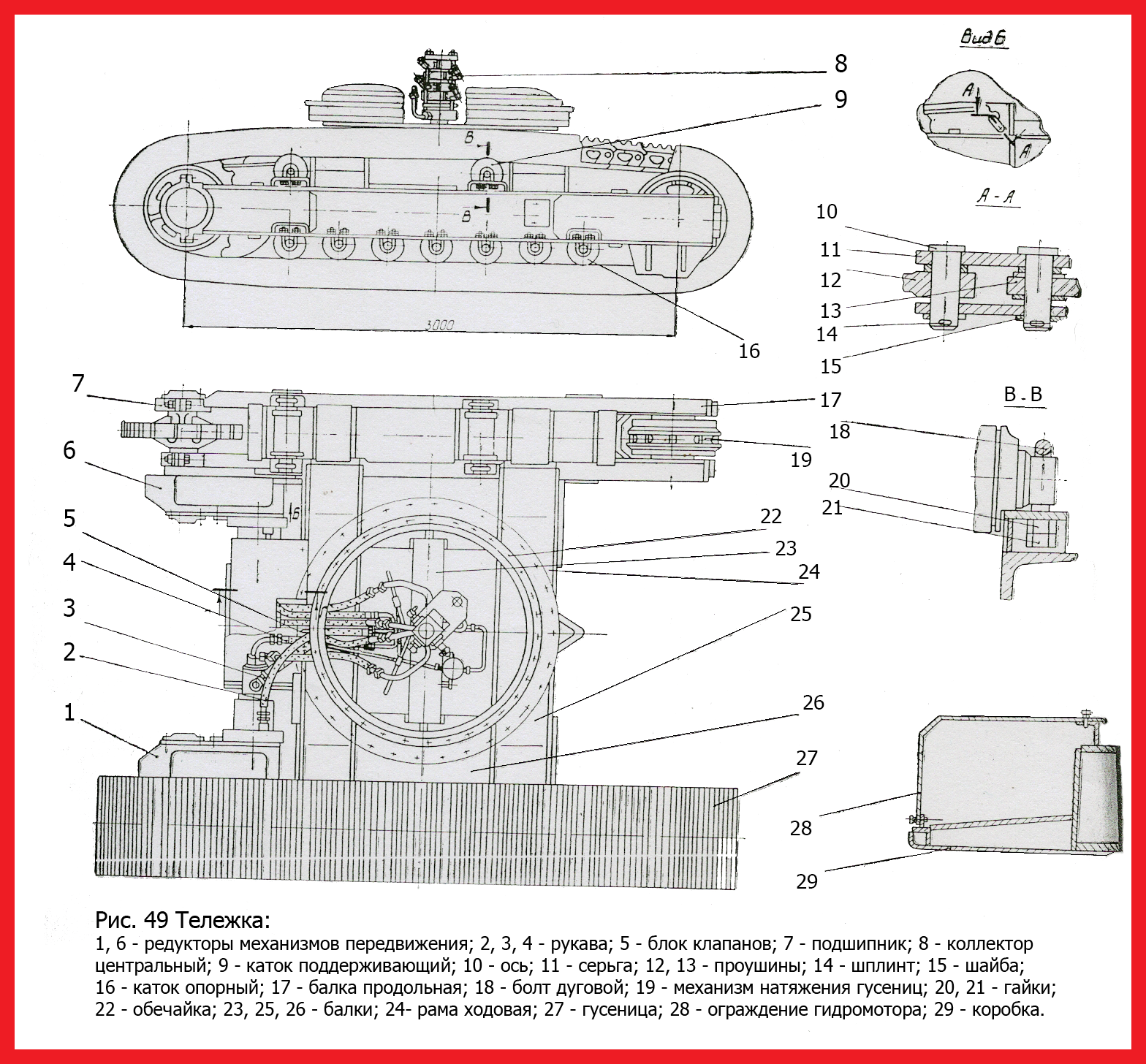
Ходовая рама 24 представляет собой сварную металлоконструкцию и является базовым узлом экскаватора. К средней части ходовой рамы, выполненной из балок 25 и 26 коробчатого сечения, приварены: литая обечайка 22, к которой болтами крепится поворотная роликовая опора с зубчатым венцом; балка 23 для крепления коллектора; коробка 29 ограждения гидромоторов редукторов; продольные балки 17.
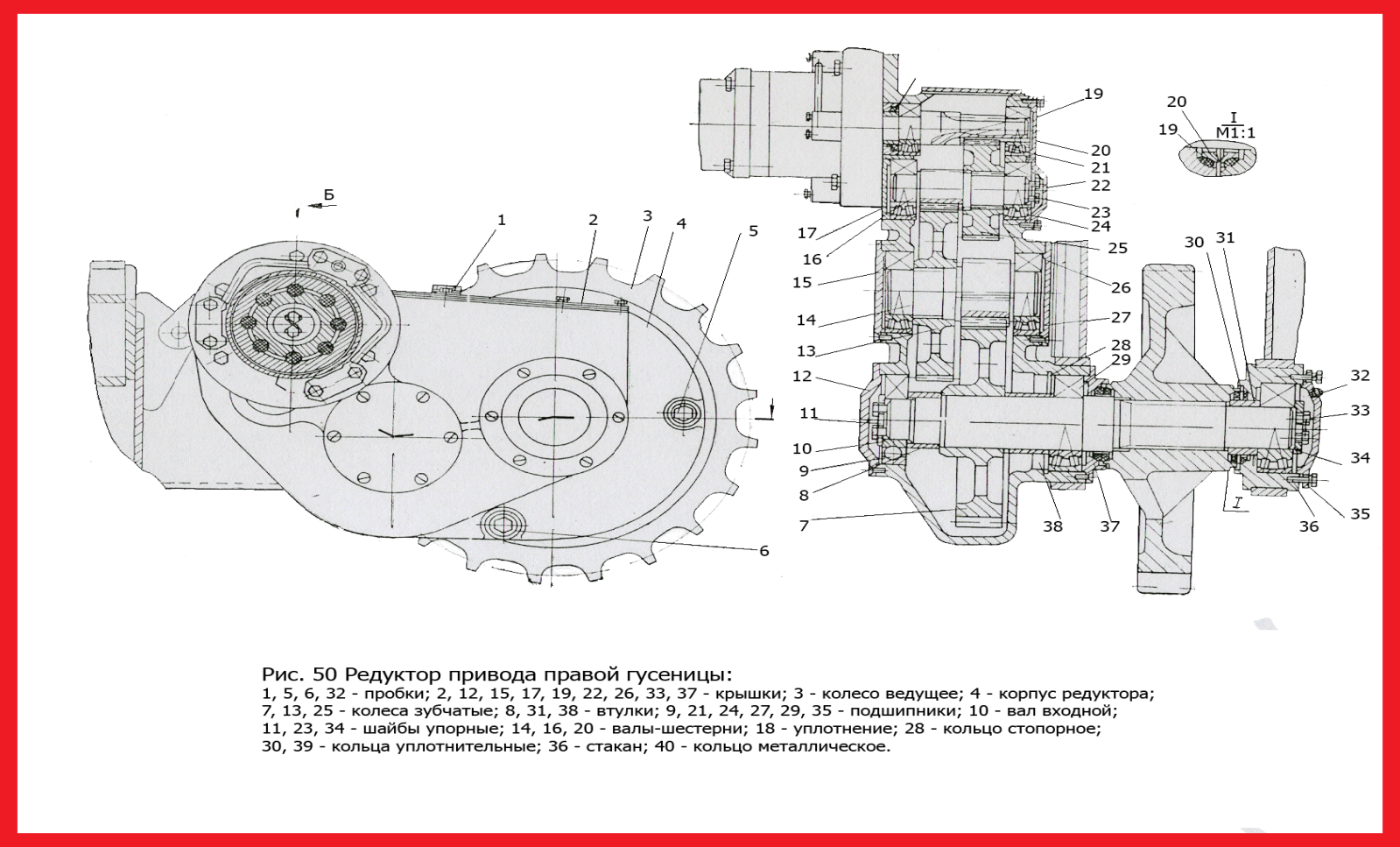
Редуктор привода правой гусеницы показан на рисунке 50 и 51. Редуктор трехступенчатый, цилиндрический. Зубчатая передача первой ступени с косыми зубьями, а второй и третьей ступени – с прямыми зубьями. Все валы установлены в стальном литом корпусе 4 (рис. 18) на подшипниках качения.
Привод редуктора осуществляется гидромотором 17 (рис. 51), жестко закрепленным к корпусу через гильзу 15.
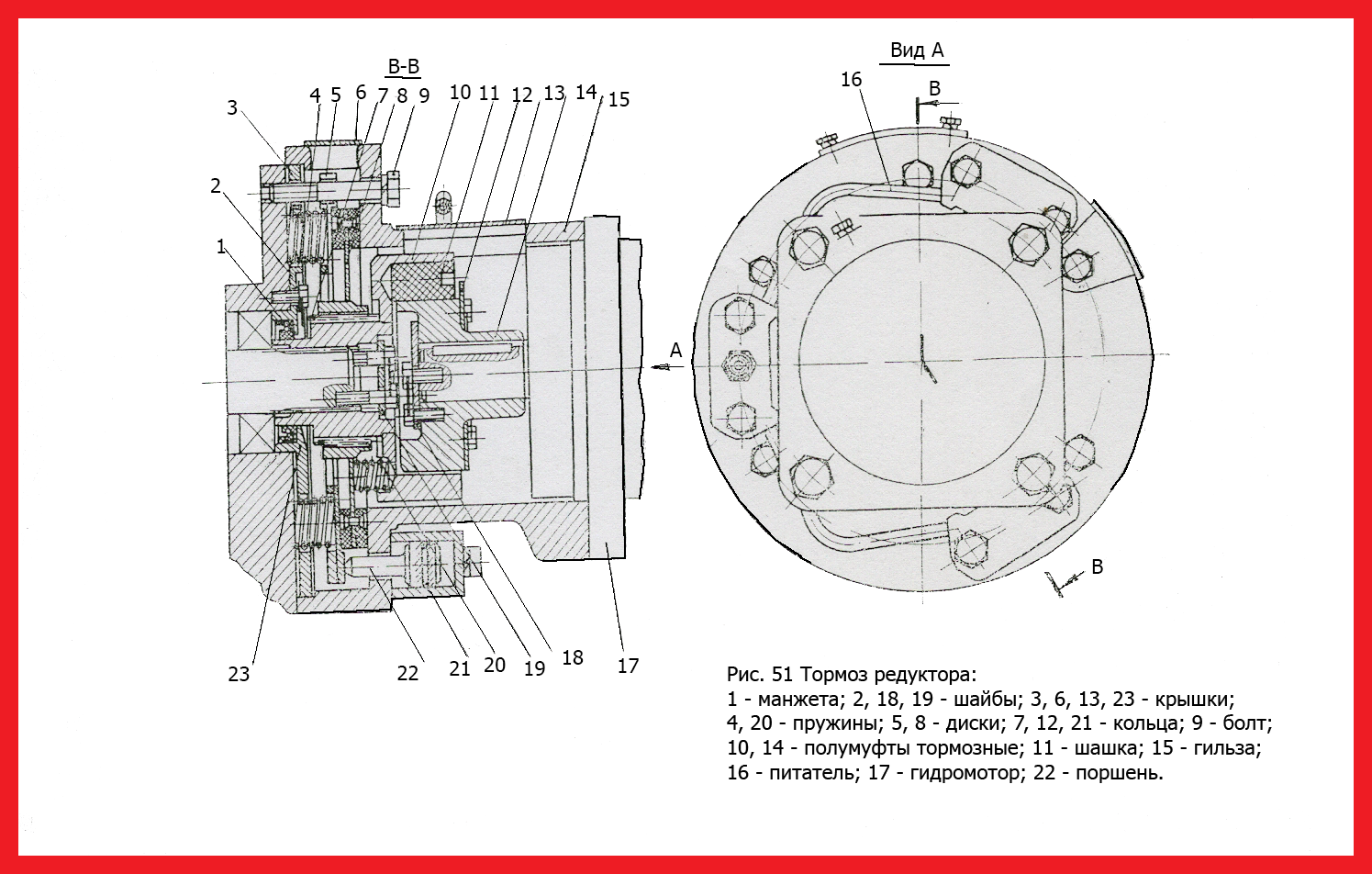
Соединение валов гидромотора и редуктора осуществляется упругой муфтой, состоящей из полумуфт 14 и 10, в цилиндрические пазы которых установлены резиновые шашки 11, удерживаемые от выпадения кольцом 12. Внутри гильзы установлен нормально замкнутый дисковый тормоз, устройство которого показано на рисунке 51. Управление тормозами производится автоматически при включении рычага управления на передвижение.
На шлицах выходного вала 10 (рис. 50) напрессовано ведущее колесо 3. Подшипники 29 и 35 служат опорами редуктора и вала ведущего колеса. Стакан 36 имеет бурты, которые исключают осевые перемещения редуктора относительно разъемной опоры продольной балки тележки. Реактивный крутящий момент редуктора воспринимается осями 10 (рис. 49) и серьгами 11, соединяющими редуктор с проушиной 13 ходовой рамы.
Уплотнение подшипниковых узлов выходного вала 10 (рис. 50) производятся резинометаллическими торцевыми уплотнениями, состоящими из металлических колец 40 с притертыми рабочими поверхностями и резиновых колец 39, которые являются упругими элементами, обеспечивающими герметичность внутренней полости и компенсации не точностей при изготовлении и износе деталей.
|
|
|
Механизм натяжения (рис. 52) предназначен для автоматического натяжения гусеницы экскаватора и сдавания натяжного колеса при попадании грунта и твердых предметов между натяжным или ведущим колесом и гусеницей, а также при наезде экскаватора на различные жесткие препятствия.

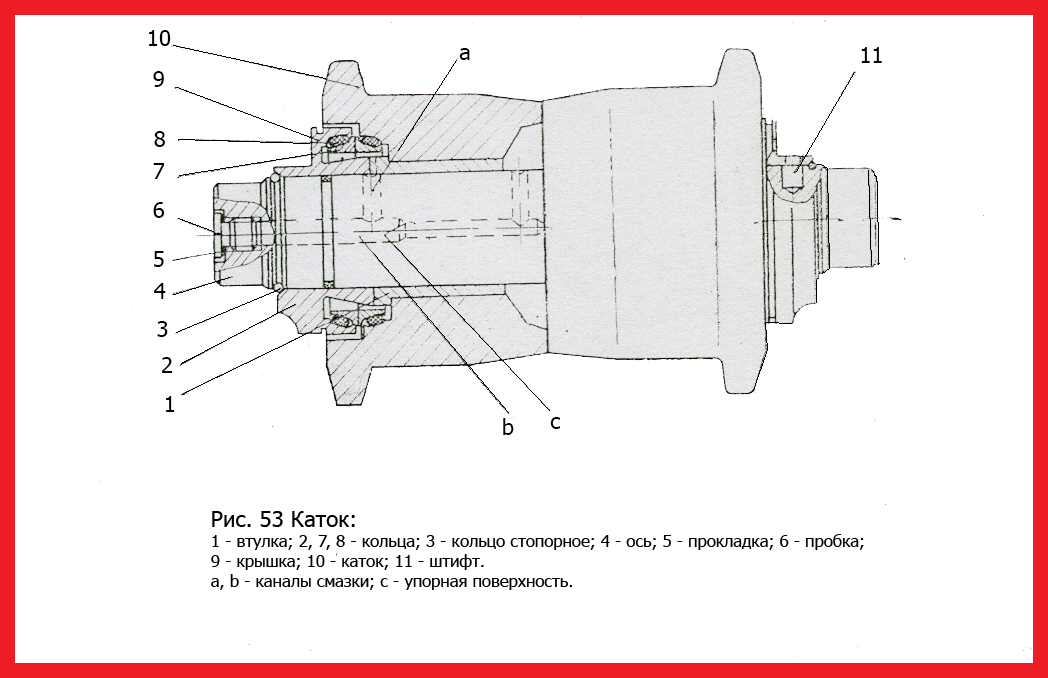
Катки опорные и поддерживающие по конструкции унифицированы и состоят из катка 10 (рис. 53), сваренного из двух штампованных половин, с запрессованными в него бронзовыми втулками 1; оси 4, крышек 9; резинометаллических торцевых уплотнений, состоящих из металлических 7 и резиновых 8 колец.
Ось катка крепится к полкам продолольных балок ходовой рамы с помощью дуговых болтов 18 (рис. 49) с гайками 20 и 21.
Гусеница (рис. 54) состоит из гусеничной цепи и прикрепленных к ней болтами 3 и гайками 7 башмаков 1.
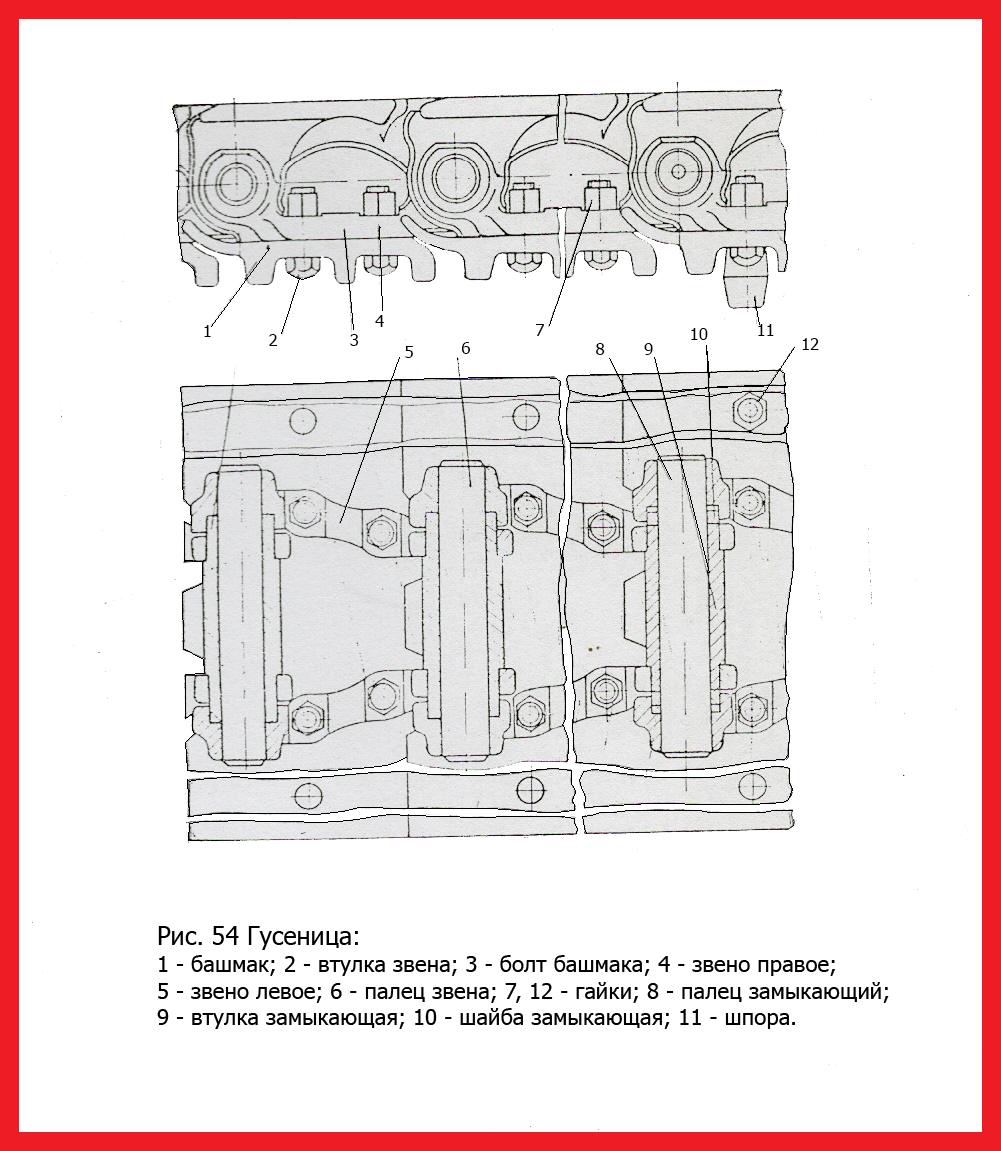
Гусеничная цепь с закрытыми шарнирами состоит из отдельных правых 4 и левых 5 звеньев, соединенных между собой шарнирно при помощи втулок 2 и пальцев 6.
В зимнее время для исключения бокового скольжения к башмакам могут крепиться шпоры 11.
Поворотная роликовая опора (рис. 55) обеспечивает вращение поворотной платформы относительно ходовой рамы и передачу на ходовое устройство нагрузок, возникающих при работе экскаватора. Опора состоит из зубчатого венца 10, верхней 5 и нижней 3 полуобойм, роликов 6 регулировочных прокладок 4 и уплотнений 7 и 8. Ролики 6 расположены крестообразно.
|
|
|
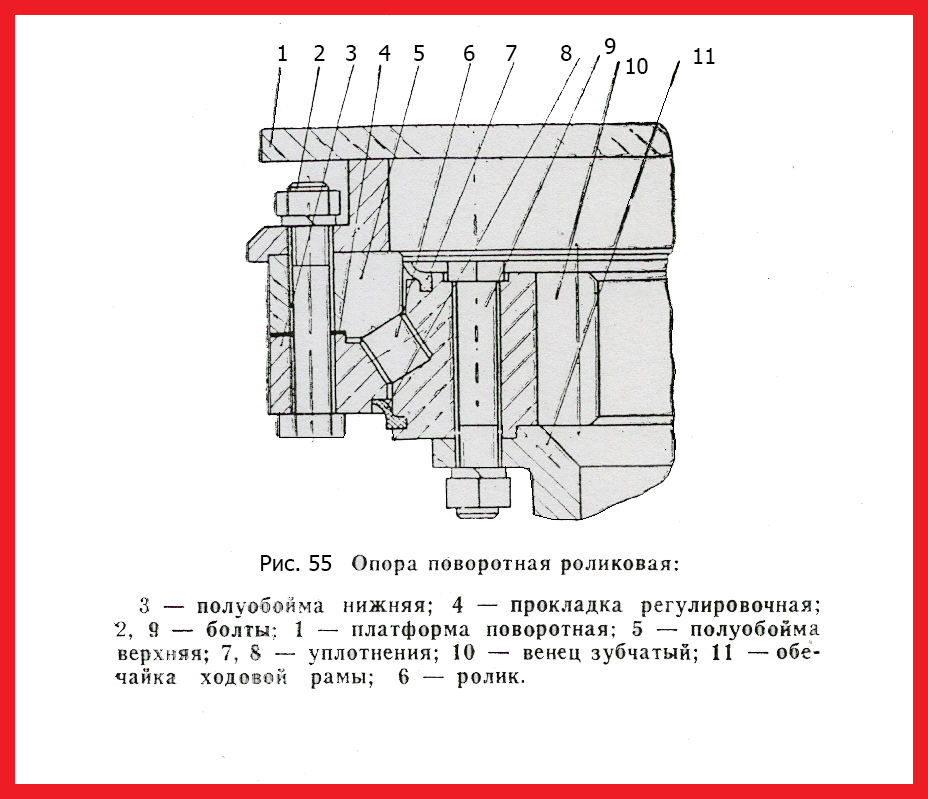
Регулировочные прокладки 4 служат для получения необходимого осевого зазора.
Зубчатый венец крепится к обечайке 11 ходовой рамы болтами 9. Верхняя и нижняя обоймы стягиваются между собой и крепятся болтами 2 к поворотной платформе 1. Нижняя и верхняя обоймы стягиваются восемью монтажными болтами, которые обеспечивают соединение обойм опоры, снятой экскаватора. На нижней опоре диаметрально расположены четыре масленки.
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 1494; Нарушение авторских прав?; Мы поможем в написании вашей работы!