КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синтез регуляторов тока и скорости в ЭПпостоянного тока
|
|
|
|
Наибольшее распространение среди систем управления скоростью ДТП получили системы, в которых скорость регулируется изменением напряжения на якоре двигателя за счет управляемого преобразователя (тиристорного или транзисторного выпрямителя, широтно-импульсного преобразователя) при подчиненном контуре регулирования тока двига-теля. Функциональная схема ЭП с подобной системой регулирования рис. 7.5, где двигатель Д с независимым возбуждением получает питание от управляемого преобразователя УП – реверсивного тиристорного преобразователя с двумя выпрямительными группами со встречно-па-раллельной схемой включения и с раздельным их управлением.
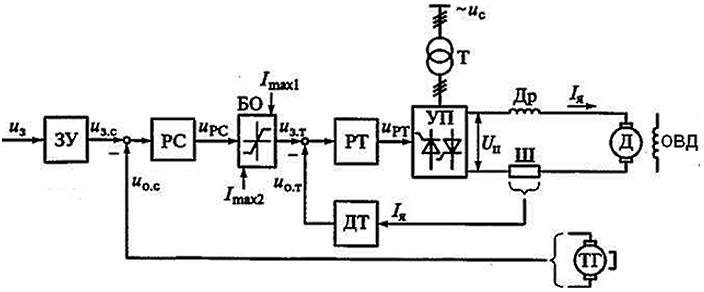
Рис. 7.5. Функциональная схема ЭП с подчиненным регулированием тока и скорости
Согласование номинальных значений напряжения, питающем УП сети ~ uc, его выходного напряжения и тока якоря двигателя, обеспе-чивается трансформатором Т. При необходимости улучшения условий коммутации тока якоря двигателя за счет ограничения скорости его изменения в цепи якоря двигателя устанавливается дроссель Др. Сглаживание пульсаций тока якоря способствует также уменьшению вибраций и шума в двигателе.
Система управления ЭП содержит два контура регулирования: внутренний контур тока якоря (КТ) и внешний контур скорости (КС). Контур тока включает в себя силовую часть ЭП с выходом по току якоря Iя, цепь ООС по току якоря и регулятор тока якоря РТ. На входе РТ сравниваются напряжение задания тока якоря u зт и напряжение ОС иот, поступающее с датчика тока ДТ. На вход ДТ подается напряжение с шунта Ш, пропорциональное току якорной цепи двигателя. Блок БО ограничивает выходное напряжение иРС регулятора скорости PC.
|
|
|
Блок БО ограничивает выходное напряжение PC и тем самым максимальное напряжение задания u ЗТ тока якоря двигателя, обес-печивая в замкнутом КТ якоря двигателя ограничение этого тока на уровне максимально допустимого значения I МАХ. Уровень ограничения статической характеристики БО независимо регулируется сигналами I МАХ1, I МАХ2.
Структурная схема ЭП (рис. 7.6) соответствует следующим допуще-ниям: регулировочная характеристика управляемого преобразователя линейна; ток якорной цепи двигателя непрерывный; отсутствует реакция якоря двигателя; момент инерции, приведенный к валу двигателя, пос-тоянен; инерционность датчиков тока и скорости не учитывается ввиду ее малости. Обозначения, принятые на схеме:
ТЭ – электромагнитная постоянная времени якорной цепи, с;
RЯ – сопротивление якорной цепи, Ом;
J – суммарный момент инерции ЭП, приведенный к валу двигателя, кг·м2;
КП – коэффициент усиления УП;
ТП – постоянная времени цепи управления преобразователей учиты-вающая коммутационные запаздывания и наличие фильтров, с ТП<10мс;
КЖ – передаточный коэффициент двигателя, рад/В·с;
кОТ – коэффициент ОС по току, Ом;
кОТ – коэффициент ОС по скорости двигателя (В·с)/рад;WРТ(p) и WРС(p) – передаточные функции регуляторов соответственно тока и ско-рости.
Внешний контур скорости. Данная схема не соответствует каскадной структуре подчиненного регулирования (см.рис. 7.4) из-за допол-нительной связи по ЭДС двигателя, воздействующей на контур тока. С помощью известных правил преобразования структурных схем можно привести данную схему к видукаскадной структуры (рис. 7.7).
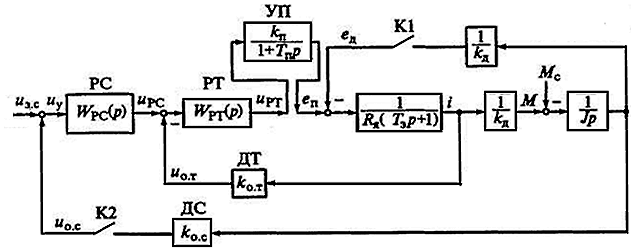
Рис. 7.6. Структурная схема ЭП с подчиненным
регулированием тока и скорости
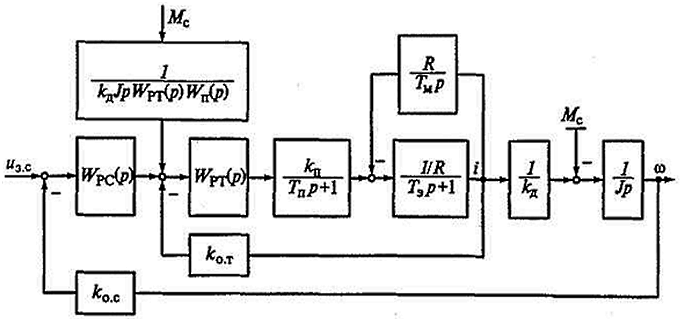
Рис. 7.7. Преобразованная структурная схема ЭП
Тогда передаточная функция разомкнутого контура тока будетиметь вид
 , (7.29)
, (7.29)
где кТ – коэффициент усиления в контуре тока;
|
|
|
 . (7.30)
. (7.30)
За Tμ для контура тока может быть принята малая постоянная времени преобразователя Тп.Приравнивая выражения (7.29) и (7.30), получаем
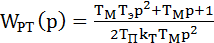 . (7.31)
. (7.31)
Без учета ОС по ЭДС двигателя
 , (7.32)
, (7.32)
 . (7.33)
. (7.33)
Из-за действия ЭДС двигателя оптимизированный без учета этого действия контур тока не является астатическим. При включении контура тока на неизменное задающее напряжение иЗ.Т устанавливается, согласно (7.29) и (7.33), постоянное значение тока
 , (7.34)
, (7.34)
которое оказывается в  раз меньше заданного значения
раз меньше заданного значения  Это объясняется тем, что после отработки контуром тока скачка напря-жения пропорциональной части ПИ-регулятора
Это объясняется тем, что после отработки контуром тока скачка напря-жения пропорциональной части ПИ-регулятора  его интеграль-ная составляющая 1/kT2TП робусловливает линейное нарастание ЭДС преобразователя еП и линейное нарастание ЭДС двигателя еД (рис. 7.8). При достижении предельного значения еП = Ептах ток начинает снижать-ся, стремясь к нулю при отсутствии момента нагрузки. В установив-шихся режимах при М = МСи I = IС интегральная составляющая ПИ-регулятора обеспечивает постоянное значение тока
его интеграль-ная составляющая 1/kT2TП робусловливает линейное нарастание ЭДС преобразователя еП и линейное нарастание ЭДС двигателя еД (рис. 7.8). При достижении предельного значения еП = Ептах ток начинает снижать-ся, стремясь к нулю при отсутствии момента нагрузки. В установив-шихся режимах при М = МСи I = IС интегральная составляющая ПИ-регулятора обеспечивает постоянное значение тока  ;
;
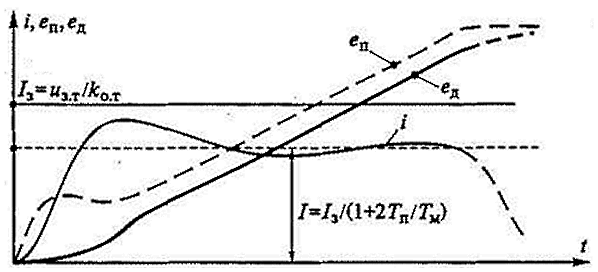
Рис. 7.8. Переходные функции тока, ЭДС преобразователя и двигателяпри скачке задания на входе контура регулирования тока
При этом электромеханическая характеристика двигателя предс-тавляет собой вертикальную прямую в диапазоне скоростей, опреде-ляемом значениями ±Enmax.
Контур тока входит в состав объекта управления контура скорости. Без учета ЭДС двигателя (ключ К1 на рис. 7.6 разомкнут) и при МС=0 передаточная функция разомкнутого контура скорости имеет вид

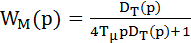
где DT(p) = 2Тμр(Тμр+1)+1 – характеристический полином оптимизиро-ванного замкнутого контура тока.
Настраивая контур скорости на модульный оптимум с желаемой передаточной функцией
определяем тип и параметры регулятора скорости:
 (7.35)
(7.35)
Для получения МО в контуре скорости требуется ПИ-регулятор скорости, реализуемый как усилитель с характеристикой управления:


где uНАС = uЗ.Т = kО.ТIЗ.
Передаточная функция замкнутого контура скорости (ключ К2 на рис. 7.6 замкнут) относительно скорости определяется выражением
 (7.36)
(7.36)
где малая постоянная времени Тμ = ТП.
Реакция оптимизированного контура скорости на возмущение по моменту нагрузки при uЗ.С = 0 определяется передаточной функцией по данному воздействию, которая находится из структурной схемы рис. 7.6:
|
|
|

где βз – жесткость механической характеристики ЭП с настроенным на МО контуром скорости;
где β – жесткость естественной механической характеристики ЭП (Р = J/TM).
Регулирование скорости пропорциональным регулятором оказы-вается статическим. В зависимости от значения отношения TМ/(4Tμ) жесткость замкнутогоЭП может быть больше, меньше или равной жесткости естественной характеристики (рис. 7.9).
Для получения астатического регулирования скорости может быть использован симметричный оптимум на основе ПИ-регулятора скорости (ПИ-PC). Передаточная функция ПИ-PC определяется на основании известной для СО желаемой передаточной функции разомкнутого контура
 (7.37)
(7.37)
Передаточная функция замкнутого контура скорости с ПИ-РС
определяется выражением 7.38.
Реакция оптимизированного по СО контура скорости на возму-щение по моменту нагрузки при uЗ.С = 0 определяется передаточной функцией 7.39.
 , (7.38)
, (7.38)
 . (7.39)
. (7.39)
Регулирование скорости при ПИ-PC оказывается астатическим, т.е. механическая характеристика ЭП в не действия токоограничения имеет в установившихся режимах (р=0) бесконечно большую жесткость (харак-теристика 1 на рис. 7.9).
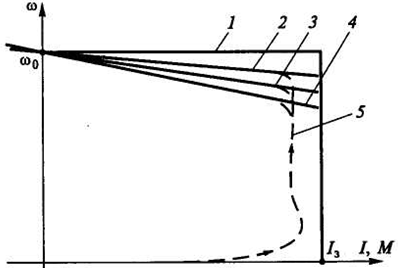
Рис. 7.9. Механические характеристики ЭП с подчиненным регулированием тока и скорости:
1– при ПИ-РС; 2– при П-РС и TМ/(4Tμ) > 1; 3 – при П-РС и TМ/(4Tμ)=1; 4 –при П-РС и TМ/(4Tμ) < 1; 5 –динамическая механическая характеристика
Согласно формулам (7.36), (7.38), характеристические полиномы замкнутого контура скорости с П-РС и ПИ-PC имеют соответственно третий и четвертый порядки. В практических расчетах данные полиномы заменяют без значительной погрешности на полином второго порядка, пренебрегая в контуре тока малой постоянной времени Tμ(DT(p) = Ттр + 1 = 2 Tμр + 1) или принимая контур тока за безынерционный (DT(p) = 1).  Отработка контуром скорости скачков задающего воздействия или мо-мента нагрузки в относительных единицах ω/ω3, М/МС или i/IС согласно передаточным функциям (7.38) и (7.39), показана на рис. 7.9.
Отработка контуром скорости скачков задающего воздействия или мо-мента нагрузки в относительных единицах ω/ω3, М/МС или i/IС согласно передаточным функциям (7.38) и (7.39), показана на рис. 7.9.
|
|
|
Отработка небольшого скачка задания скорости, когда отсутствует насыщение регулятора скорости (uРС<uнас), происходит при П-РС с пере-регулированием σ = 8% (кривая 1), а при ПИ-PC и фильтре с пос-тоянной времениTμ на входе контура – с σ = 6,2% (кривая 3).
Аналогично протекает и процесс сброса момента нагрузки. При большом скачке задания скорости, когда иРС = инас, контур тока обес-печивает постоянство тока i = uнас/кО.Т (без учета влияния ЭДС двигате-ля) и линейное нарастание скорости до момента времени, когда PC выхо-дит из насыщения. Далее снижается задание на ток, который стремится к нулю при Мс = 0, а скорость стремится к значению ω0 = иЗ.С/kО.С.
Динамический перепад скорости ∆ω в режиме наброса момента нагрузки МС определяется в соответствии с данной передаточной функ-цией (7.40):
 . (7.40)
. (7.40)
Подставляя в (7.40) выражение для W3(р), получаем при П-РC:
 . (7.41)
. (7.41)
И при ПИ-РС:
 . (7.42)
. (7.42)
На рис. 7.10 изображены переходные функции относительных значений тока, момента, скорости по задающим воздействиям при модульном оптимуме (1), симметричном оптимуме без входного фильт-ра (2) и с входным фильтром (3), а также переходные функции относи-тельного перепада скорости по скачку момента нагрузки при симмет-ричном (4) и модульном (5) оптимумах.
Внутренняя связь по ЭДС двигателя при сохранении стандартных настроек регуляторов несколько повышает демпфи рование и снижает перерегулирование в режимах отработки сброса – наброса момента нагруз-ки.

|
| Рис. 7.10. Переходные функции относительных значений тока, момента, скорости по задающим воздействиям |
ЭДС оказывает влияние и на работу контуров тока и ско-рости при отработке входных воздействий, снижая динами-ческий ток при скачке задания и повышая ошибку отработки скорости при ее линейном за-дании. Существенное влияние ЭДС проявляется только при неблагоприятном соотношении параметров (пониженные зна-чения ТМ и ТЭ, повышенное значение Tμ).
Простота П- и ПИ-регуля-торов и их оптимальных наст-роек обусловила преимущест-венное применение данных ре-гуляторов в системах управле-ния с подчиненным регулированием координат ЭП.
Рассмотрим пример синтеза регуляторов тока и скорости в системе подчиненного ЭП:
Пример 7.1. Определить тип и параметры регуляторов тока и ско-рости рис.7.11, составить элементную базу их аналогового исполнения при условии токоограничения на уровне максимально допустимого тока двигателя и статизма контура скорости не более 5%.
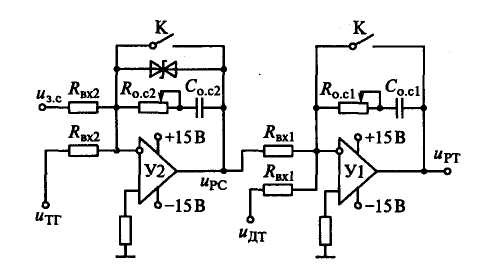
Рис. 7.11. Схемы регуляторов тока и скорости
Исходные данные:силовая часть ЭП представляет собой тиристор-ный преобразователь – ДПТНВ; номинальные напряжение, ток, момент и скорость двигателя:
ином = 220 В, Iном = 21 А, Мном = 23,5 Н · м, ωном = 162 рад/с;
максимально допустимые ток и момент двигателя:
Imах = 63 А, Мmах = 70Н·м;
передаточный коэффициент и момент инерции двигателя:
кд = 0,83 рад/(В ∙ с), J = 0,05 кг∙ м2;
сопротивление и электромагнитная постоянная времени якорной цепи:
Rя = 1,8 Ом, Тэ = 0,022 с;
максимальная ЭДС, коэффициент усиления и постоянная времени тиристорного преобразователя:
Еп.мах = 300 В, кп= 25, Тп= Tμ= 0,01 с;
а также передаточный коэффициент датчика скорости
кдс = кос = 0,032 В·с/рад.
Решение
По условию задачи принимаем за элементную базу построения регуляторов операционные усилители с напряжением питания ±15 В и выходным стабилизированным напряжением ±10 В (например, мик-росхемы типа К553 УД2).
Для контура тока без учета влияния ЭДС двигателя используется пропорционально-интегральный тип регулятора с передаточной функ-цией Wрт(р) = (Tк1+ 1)/Т01р и параметрами Гк1 = Тэ = 0,022с, TO1 =2Тμкт. Для заданного токоограничения на уровне Imах = 63А и максимального стабилизированного напряжения на входе контура тока uзтmах = uнас = 10В определяем коэффициент ОС по току, и постоянную интегрирования регулятора:
 ,
,

Действие ЭДС двигателя на контур тока при пуске с насыщенным РС снижает максимальный ток до значения
Здесь Тм = k2дRяJ=0,832· 1,8 · 0,05 = 0,062 с. Подставляя полученное значение в приведенную выше формулу, получаем
При выборе типа регулятора скорости следует учитывать допустимый по условию задачи статизм регулирования скорости

Статизм, соответствующий естественной механической характерис-тике ЭП, составляет

Следовательно, требуемое повышение жесткости механической ха-рактеристики
П-регулятор скорости обеспечивает повышение жесткости

Таким образом, П-РС не обеспечивает требуемого статизма регули-рования скорости и следует принять пропорционально-интегральный тип регулятора с передаточной функцией
Для реализации регуляторов тока и скорости используем опера-ционные усилители в схеме включения ПИ-регулятора (рис. 7.11).
Параметры регуляторов обеспечиваются соответствующими значе-ниями сопротивлений и емкостей с учетом условия, что сопротивление нагрузки усилителя Rнaг должно быть не меньше допустимого Rдоп (для типовых микросхем R=2кОм).
Для регулятора тока
Со.с1 = 0,5 мкФ; Ro.с1 = 44 кОм; Tк1 = Ro.с1Сo.с1 = 0,022 с; Rвх1 = 88 кОм; Т01 = Rвх1Со.с1 = 0,044 с.
Для регулятора скорости
Со.с2 = 1 мкФ; Ro.с2 = 80 кОм; Тк2 = Ro.с2 Со.с2= 0,08 с; Rвх2 = 15,4 кОм; Т02= Rвх2Сос2 = 0,0154 с.
Максимальное задающее напряжение
Uз.cmax = ко.с кдЕп0 = 0,032·0,83·233 = 6,2В.
Схема управления серийного электропривода типа ЭТЗР
Для привода механизмов различных металлообрабатывающих стан-ков, требующих регулирования скорости при мощности до 11 кВт, ис-пользуется серийный комплектный ЭП типа ЭТЗР (рис. 7.12) с двигателями серий ПБСТ, 2П или ПГТ. ЭП этого типа выполнен в виде замкнутой системы регулирования скорости с ООС по скорости, которая в зависимости от настройки обеспечивает относительный перепад ско-рости в пределах 0,5-10% при изменении момента нагрузки от 0,1 Mном до Mном. В ЭП обеспечивается также регулирование (ограничение) тока с помощью устройства токоограничения УТО. Для обеспечения устойчи-востии требуемого качества переходных процессов ЭП в схеме приме-нены гибкие ОС по скорости двигателя и результирующему сигналу уп-равления Uy2.
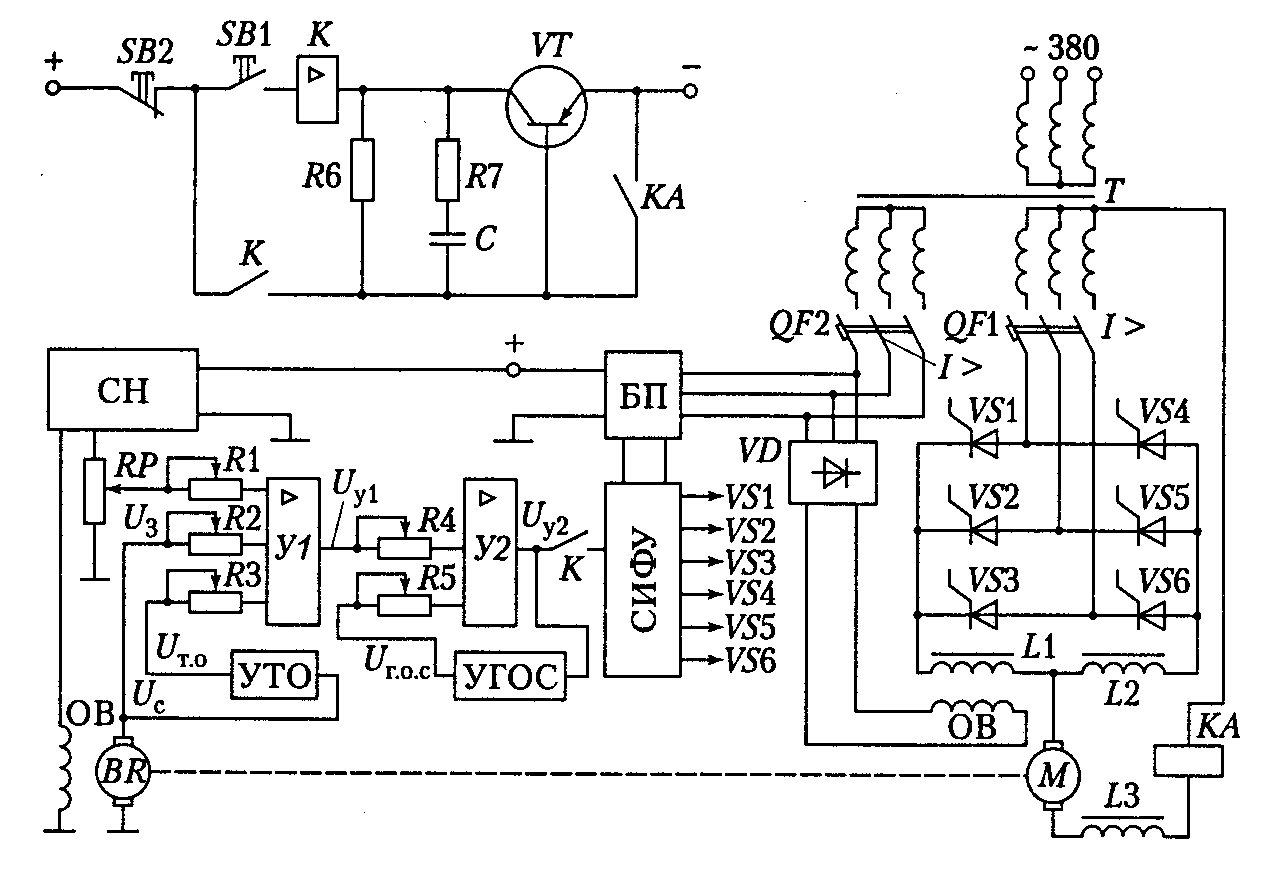
Рис. 7.12. Схема серийного ЭП типа ЭТЗР
Якорь двигателя, имеющего встроенный тахогенератор BR, полу-чает питание от реверсивного тиристорного преобразователя с двумя комплектами тиристоров VS1–VS6, составляющих выпрямительную и инверторную группы. Управление этими группами осуществляется с ис-пользованием согласованного совместного принципа.
Для уменьшения переменной составляющей уравнительного тока, протекающей между выпрямительной и инверторной группами, в схеме используются ограничительные реакторы L1 и L2. Включение в цепь якоря сглаживающего реактора L3 позволяет исключить режим преры-вистого тока и повысить использование двигателя по току.
Управление тиристорами VS1–VS6 обеспечивается транзисторной схемой СИФУ, работающей по вертикальному принципу. Она имеет три канала, каждый из которых работает на два тиристора, включенных в од-ну фазу.
Питание ЭП осуществляется от трехфазного трансформатора Т с двумя вторичными обмотками. К одной из них, имеющей нулевой вы-вод, подключена силовая часть привода, а ко второй – обмотка возбуж-дения OВ (через выпрямитель VD) и блок питания БП, от которого пита-ется схема управления. Обмотка OВ тахогенератора получает питание от стабилизатора напряжения СН.
В состав схемы управления ЭП входят промежуточный усилитель У1, усилитель мощности (эмиттерный повторитель) У2, узел токоогра-ничения УТО, узел гибкой ОСУГОС, задающий потенциометр RP, кноп-ки управления SB1 и SB2 и пусковое реле К.
Сигнал управления Uy1 формируется как алгебраическая сумма сиг-налов задающего Uз, ОС по скорости Uс и токоограничения Uт.о, для вы-работки которого используется нелинейная положительная ОС по ско-рости двигателя. При токе якоря, меньшем тока отсечки, работает только контур регулирования скорости. При токе якоря, превышающем ток от-сечки, за счет нелинейности цепи токоограничения отрицательная ОС по скорости ДПТ отключается и начинает действовать положительная ОС, обеспечивая ограничение тока и момента на заданном уровне.
Для обеспечения необходимого качества переходных процессов ЭП в схеме используется гибкая ОС, действующая только в переходных процессах. Сигнал корректирующей гибкой обратной связи Uг.o.с вместе с сигналом управления Uy1 поступает на вход усилителя мощности У2 и после усиления в виде результирующего сигнала Uу2 подается на вход СИФУ через замыкающий контакт пускового реле К. Управление этим реле осуществляется с помощью кнопок управления: SB1 при пуске дви-гателя и SB2 при его останове. Реверсирование двигателя осуществляет-ся путем изменения полярности задающего сигнала Uy.
В ЭП типа ЭТЗР реализуется ряд защит, блокировок и сигнализа-ций. Токовое реле КА, катушка которого включена в цепь якоря двигате-ля, а контакт – в цепь питания реле К, обеспечивает максимальную токо-вую защиту ЭП. При его срабатывании отключается реле К, с тиристо-ров снимаются сигналы управления и двигатель отключается от источ-ника питания.
Автоматические выключатели QF1 и QF2 осуществляют максималь-ную токовую защиту силовой части тиристорного преобразователя, об-мотки возбуждения двигателя и схемы управления.
Схема ЭПс микропроцессорным управлением
Рассмотрим схему ЭП с ДПТ для регулирования положения испол-нительного органа робототехнического устройства с использованием МП управления (рис.6.5, фрагмент программы рис.7.13). Этот ЭП должен обеспечивать перемещение и точное позиционирование испол-нительного органа робота, для чего в нем используется ОС по положению. Для обеспечения высокой точности позиционирования в ЭП осуществляется также регулирование тока (момента) и скорости.
Характерный пример выполнения подобных схем (см. рис.6.5, когда в них применяются как аналоговые, так и цифровые узлы и устройства управления. Такие схемы, получившие название цифроаналоговых, соче-тают в себе лучшие свойства тех идругих уст-ройств.
|
| Рис.7.13. Фрагмент программы ЭП с микропроцессорным управлением |
Силовая часть ЭП образована трехфазным мостовым реверсивным тиристорным преобразо-вателем ТП, питаемым от трансформатора ТР. Схема управления построена по принципу под-чиненного регулирования координат. Регулирова-ние тока производится аналоговым ПИ-регулято-ром тока РТ, на вход которого поступают сигналы обратной связи по току от датчика тока ДТ изадания тока UЗ.Т, с выхода регулятора скорости.
Аналоговый П-регулятор скорости реформи-рует сигнал задания тока UЗ.Т на основе своего за-дающего сигнала UЗ.С,поступающего на него с внешнего по отношению к нему контура поло-жения, и сигнала ОС по скорости, вырабатыва-емого тахогенератором ТГ. Стабилитроны VD1 и VD2 ограничивают сигнал на выходе PC, чем обеспечивается ограничение тока и момента дви-гателя.
Регулирование положения осуществляется с помощью микропроцессорной системы, включа-ющей в себя микропроцессор МП, устройства па-мяти ОЗУ и ПЗУ,устройства сопряжения УС1–УСЗ, цифровой датчик положения ДП, цифро-аналоговый преобразователь ЦАП. Сигнал задания положения SЗ.П пос-тупает (задается) с терминала Т, подключаемого к микропроцессорной системе через УСЗ. Тем самым микропроцессорная система выполняет, по существу, роль регулятора положения РП.
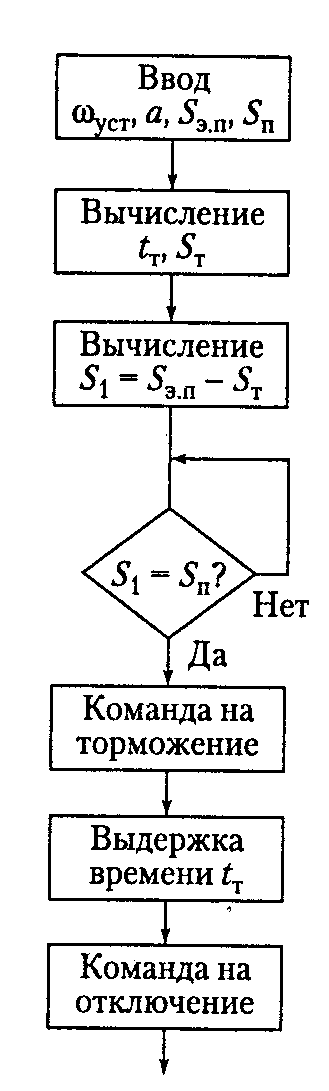
Работа цифрового РП в МП системе может основываться на одном из двух принципов. Первый из них предусматривает реализацию статической характеристики РП в виде параболы, которая обеспечивает оптимальный график движения ЭП. Такой регулятор можно реализовать программным путем, записав в ПЗУ эту нелинейную характеристику РП.
Второй принцип работы РП основан на вычислении момента начала торможения ЭП, что также позволяет получить требуемую точность ре-гулирования положения. Реализация способа основана на том, что при известных скорости ωУСТ и ускорении  могут быть рассчи-таны время tТ и путь
могут быть рассчи-таны время tТ и путь  на участке торможения ЭП в конце отработки заданного перемещения SЗ.П по следующим формулам:
на участке торможения ЭП в конце отработки заданного перемещения SЗ.П по следующим формулам:
 , (7.41)
, (7.41)
 . (7.42)
. (7.42)
Алгоритм работы МП системы при выработке сигнала на торможе-ние приведен на рис. 7.13. Для его реализации в микропроцессорную систему вводятся данные по величинам ωУСТ, а, SЗ. П и сигнал SП датчика положения ДП, пропорциональный текущему положению вала двигателя и исполнительного органа. МП система производит вычисление tт и по (7.41) и (7.42) и разности S1 = SЗ. П –SЗ. Затем сопоставляются величины этой разности S1 с сигналом датчика положения SП. Как только S1, станет равной SП, от МП системы выдается команда на торможение ЭП, начинается отсчет выдержки времени tт , и по истечении этого ин-тервала выработается команда на отключение ЭП.
Пример 7.2. ЭП рис.7.14. Двигатель имеет данные РНОМ = 14кВт, напряжение питания UНОМ = 220 В, номинальная скорость ωНОМ = 104,7 рад/с, номинальный ток якоря IНОМ = 82 А, номинальный КПД ηНОМ = 82%, сопротивление цепи якоря RЯ = 0,22 Ом, индуктивность цепи якоря LЯ= 4,4 мГн.
Параметры других элементов схемы:
1) преобразователь: коэффициент усиления kП = 23, постоянная вре-мени ТП = 0,01 с, внутреннее сопротивление RП= 0,15 Ом;
2) тахогенератор: коэффициент передачи γ = 0,6 В/(рад/с);
3) шунт: сопротивление шунта RШ = 0,00075 Ом;
4) датчик тока ДТ: коэффициент передачи kД.Т = 100. Суммарный момент инерции ЭПJ = 0,8кг•м2. Рассчитать параметры регуляторов тока и скорости и определяющие параметры цепей операционных усилителей.
Определяем суммарное сопротивление якорной цепи:
 .
.
Находим постоянную времени цепи якоря двигателя:
Находим коэффициент ОС по току. При R3 = R4 он равен
 .
.
Рассчитываем постоянную интегрирования ПИ-регулятора тока:

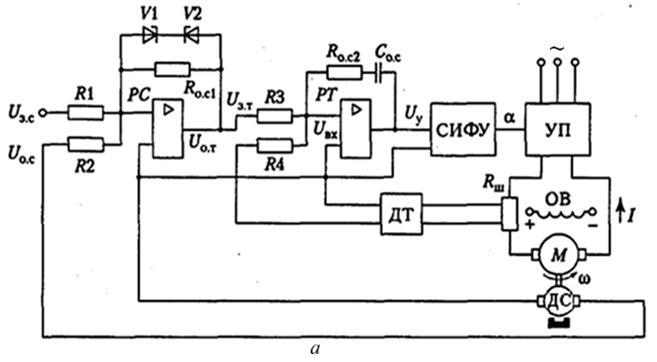

Рис.7.14. Электрический привод с СИФУ (а) и его характеристики (б, в)
Определяем коэффициент усиления регулятора тока:
Задавая RО.С2 = 10кОм, находим параметры операционного усили-теля, на котором реализован регулятор тока:


Для нахождения параметров П-регулятора скорости определяем следующие параметры двигателя и ЭП: произведение конструктивной постоянной двигателя на магнитный поток

скорость вращения холостого хода
механическая постоянная времени ЭП

Определяем коэффициент передачи РС:

ЭДС датчика скорости при скорости ω0:

Задаваясь RО.С. = 100 кОм, получим


|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 6320; Нарушение авторских прав?; Мы поможем в написании вашей работы!