КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические характеристики асинхронного двигателя при изменениях напряжения сети и активного сопротивления обмотки ротора
|
|
|
|
Результаты расчета
| S | 0,023 | 0,1 | 0,2 | 0,4 | 0,7 |
М 
| 0,046 | 1,0 | 0,80 | 0,47 | 0,28 |
| Ошибка,% по сравнению с расчетом примера 13.2 | -4,3 | — | +5,9 | -6,8 | +16,6 |
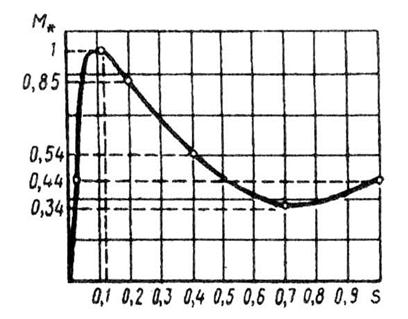
Рис. 13.4. Механическая характеристика
асинхронного двигателя типа 4А160М4УЗ
Применение упрощенной формулы (13.23) наиболее целесообразно при расчете рабочего участка механической характеристики и при скольжениях s < sкр,так как в этом случае величина ошибки не превышает значений, допустимых для технических
расчетов. При скольжениях s > sкрошибка может достигать 15—17%. Это
подтверждается расчетами примера 13.3.
Из (13.14), (13.16) и (13.19) видно, что электромагнитный момент асинхронного двигателя, а также его максимальное и пусковое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М ≡ U21. В то же время анализ выражения (13.15) показывает, что значение критического скольжения не зависит от напряжения U1. Это дает нам возможность построить механические характеристики М = f (s) дли разных значений напряжении U1 (рис. 13.5), из которых следует, что колебания напряжения сети U1 относительно его номинального значения U1ном, сопровождаются не только изменениями максимального и пускового моментов, но и изменениями частоты вращении ротора. С уменьшением напряжения сети частота вращения ротора
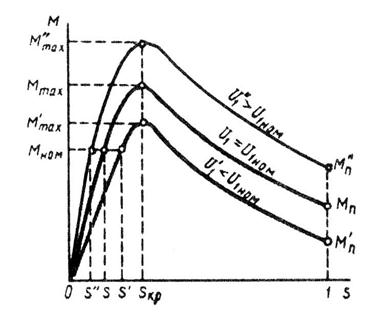
Рис. 13.5. Влияние напряжения на вид механической
характеристики асинхронного двигателя
снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном. Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое:
|
|
|
M/max = 0,72 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2, то при понижении напряжения на 30% перегрузочная способность двигателя λ' = М'max /Мном = 0,49 Mmax /Mном = 0,49  2 = 0,98, т.е двигатель не в состоянии нести даже номинальную нагрузку.
2 = 0,98, т.е двигатель не в состоянии нести даже номинальную нагрузку.
Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r/2. Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2'. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2' до некоторого значении. На рисунке это соответствует сопротивлению г2'ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2' пусковой момент уменьшается.
Анализ графиков М = f (s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2' сопровождаются изменениями частоты вращения: с увеличением r2' при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
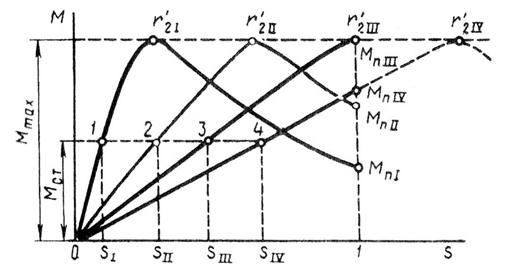
Рис. 13.6. Влияние активного сопротивленияобмотки ротора на механическуюхарактеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических
характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2'. При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I/22).Выбранное значение г2' должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента
|
|
|
увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД.
Рассмотренные зависимости M = f (U1) и М = f (r2') имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15).
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 6574; Нарушение авторских прав?; Мы поможем в написании вашей работы!