КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пространство состояний
|
|
|
|
Свойства систем, поведение которых описывают уравнения (1) - (4), можно интерпретировать графически в ортогональном пространстве размерности n. Такое пространство, координатами которого являются переменные состояния х, называется пространством состояний.
Рассмотрим, как представляется в пространстве состояний поведение системы (1)
 ,
,
при условии, что u = const. Для системы второго порядка
Состоянию системы в произвольный момент времени соответствует конкретная точка пространства состояний  , которая называется изображающей точкой системы (рис. 1). С изменением времени эта точка выписывает траекторию, называемую фазовой траекторией системы.
, которая называется изображающей точкой системы (рис. 1). С изменением времени эта точка выписывает траекторию, называемую фазовой траекторией системы.
Совокупность фазовых траекторий, полученных при движении из различных начальных состояний, называют фазовым портретом системы. Он позволяет оценить свойства нелинейной системы.
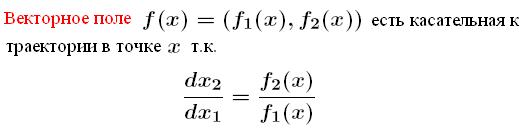
 В каждый момент времени изображающая точка системы
В каждый момент времени изображающая точка системы  имеет определенную скорость
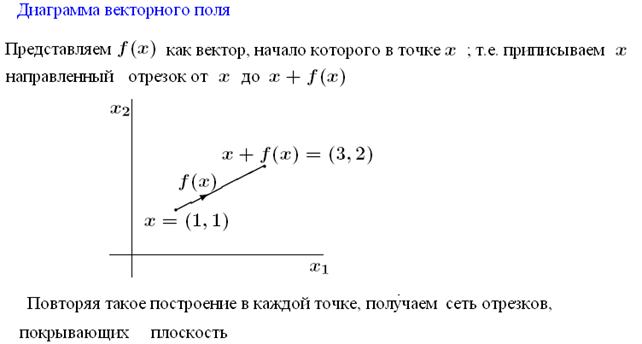
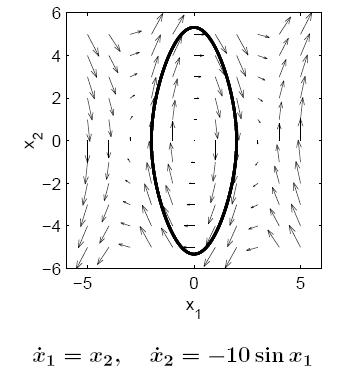
имеет определенную скорость  , которую также можно изобразить в пространстве состояний в виде вектора скорости, имеющего определенное направление. Совокупность векторов скорости будем называть векторным полем системы (рис. 2.). Для системы втого порядка
, которую также можно изобразить в пространстве состояний в виде вектора скорости, имеющего определенное направление. Совокупность векторов скорости будем называть векторным полем системы (рис. 2.). Для системы втого порядка
Точки пространства состояний, в которых вектор скорости равен нулю
 , (5)
, (5)
представляют собой точки или состояния равновесия (особые точки) системы.
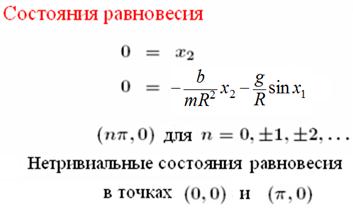
Пример. Маятник при M =0 описываются уравнениями
Отметим, что в пространстве состояний можно также исследовать свойства линейных систем, рассмотренных в предыдущих разделах.
Пример. Для системы, описываемой уравнениями
векторное поле выглядит, как показано на рис. ниже
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 519; Нарушение авторских прав?; Мы поможем в написании вашей работы!