КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Технічна характеристика верстату. Найбільший діаметр свердлування, мм 35
|
|
|
|
Найбільший діаметр свердлування, мм 35
Відстань від осі шпінделя до лицьової сторони станин, мм 300
Найбільша відстань від торця шпінделя до столу,мм 750
Найбільший хід шпінделя, мм. 225
Найбільше настановне переміщення бабці шпінделя в мм 200
Розміри робочої поверхні столу, мм:
довжина 500
ширина 450
Найбільше вертикальне переміщення столу, мм 325
Число швидкостей обертання шпінделю 9
Межі чисел оборотів шпінделя в хвилину 68—1100
Кількість величин подач 11
Межі величин подачі в мм/об 0,115—1,6
Потужність головного электродвигуну, КВт 4,5
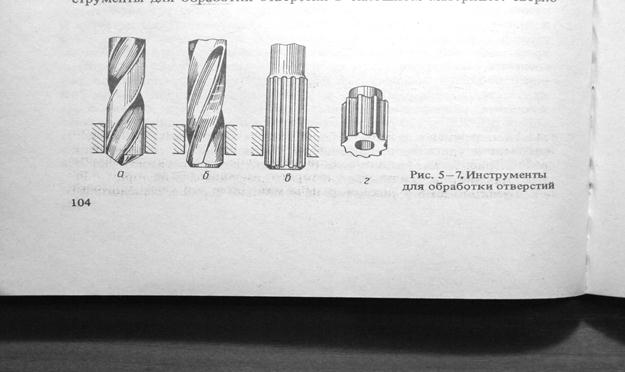

Мал. 15. Поверхні, що оброблюються на вертикально-свердлувальних
верстатах
|
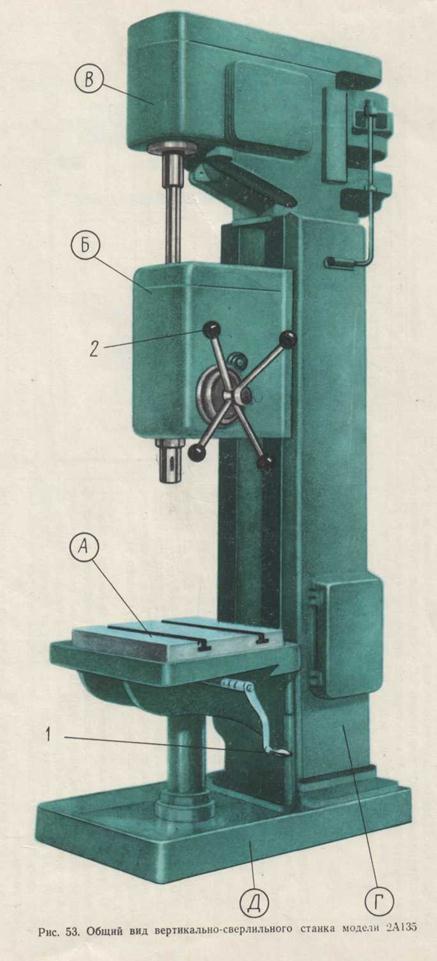
Мал. 16. Загальний вигляд вертикально-свердлувального верстату мод.2А135
Основні вузли верстату А - стіл; Би — шпиндельна бабка з коробками швидкостей та подач з висувним вузлом шпинделю; У — коробка швидкостей; Г — станина (колона); Д — опора станини.
Органи керування: / -рукоятка переміщення столу; 2- штурвал з рукоятками для переміщення висувного вузлу шпінделю та включення механічної подачі. При зовнішньому огляді верстату встановлюємо, що двигун усього один, з’єднується з коробкою швидкостей пасовою передачею.
Попередньо заготовка закріплюється безпосередньо на столі, або у пристосуванні, встановленому та закріпленому на столі (у машинних тисах, ділильних голівці або столу).
Демонструється файл 21 – обробка отворів на верстаті мод. 2А135.
Основні рухи: обертання шпинделю з інструментом, що закріплюється у патроні або безпосередньо у конусі шпинделю (свердло, зенкер, цековка, зенкер, розгортка, мітчик). Підвід інструменту до заготовки здійснюється переміщенням вручну за допомогою рейкової зубчастої передачі висувного вузлу шпинделю (невірна назва на виробництві –піноль), врізання та обробка отвору виконуються з ручною або механічною подачею через ту ж рейкову передачу. Переключення виду подачі здійснюється натиском на рукоятки подачі висувного вузлу шпинделю. Відлік глибини занурення інструменту у заготовку визначається по лімбу барабану; можна задавати глибину занурення інструменту у заготовку кулачками, що встановлені у пазу барабану. На верстаті реалізуються методи формоутворення: метод сліду – при наскрізному отворі у заготовці, метод сліду та метод копіювання (копіюються форми ріжучих кромок інструменту) при глухому отворі. При нарізання різей у отворах ланцюг подачі відключається від приводу зовсім, тому що занурення у метал заготовки здійснюється за рахунок різі мітчику, або необхідно використовувати спеціальний патрон, що компенсує різницю між встановленою величиною механічної подачі та кроком мітчику.
|
|
|
Таким чином, ланцюгом головного руху є ланцюг обертання шпинделю. Обидва ланцюги – головного руху та подачі - належать до КГФ.
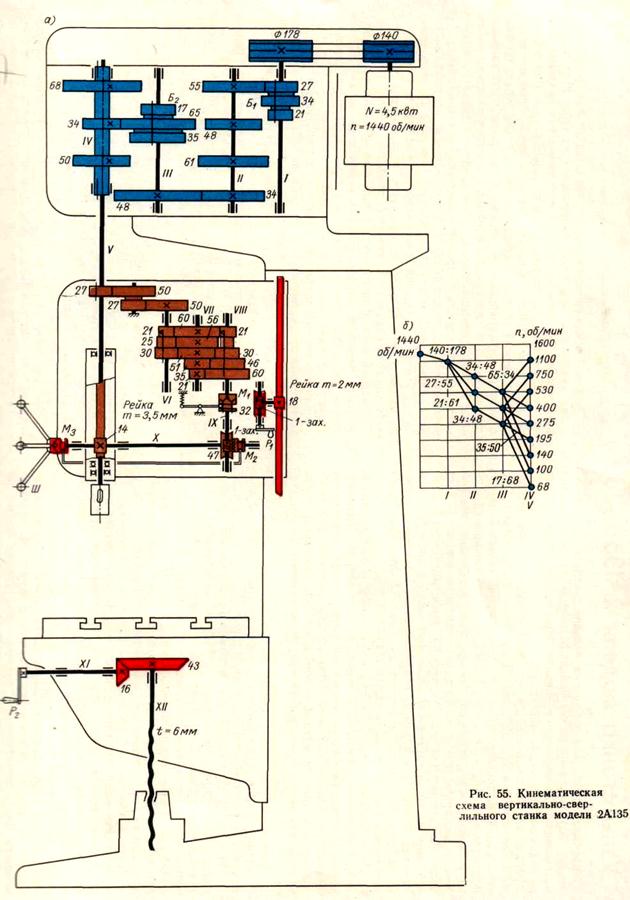
За допомогою кулачків можна настроїти ланцюг подачі на виконування ролі групи КГУ. На мал. 17 наведена кінематична схема верстату 2Н135.
Алгоритм проведення аналізу кінематичної схеми верстату:
- знаходиться двигун головного руху (двигун найбільшої потужності) як
початок ланцюгу головного руху КГФ;
- знаходиться кінцеве звено ланцюгу головного руху (для наданої схеми та за
результатами спостережень це шпиндель – вал V з умовною позначкою
шпинделя свердлувальних верстатів);
- кінцеві ланки ланцюгу фіксуються рівнянням розрахункових перемі-
щень: ліва та право частини рівняння записуються через стрілку, що пока-
зує напрямок руху, що передається по ланцюгу;
- за характеристиками верстату визначають розмірність подачі та відповідно-
|
|
|
початок ланцюгу подач (в нашому випадку подача надана у мм/об. шпин-
деля, тому початок ланцюгу – від шпинделя верстата – зубчасте колесо
Z = 27);
- кінцева ланка ланцюгу подач переміщує інструмент відносно заготовки,
тому виявляється остання кінематична пара ланцюгу, яка здійснює це пере-
міщення за результатами спостережень (як виявлено – це зубчаста рейкова
пара з рейковим колесом Z Р= 14 та рейкою m Р = 3,5 мм);
- записують рівняння розрахункових переміщень для ланцюгу подачі (від
початку до кінця ланцюгу також через стрілку);
- від самого початку до самого кінця ланцюгу головного руху знаходять най-
коротший шлях зв’язку та записують в одну стрічку послідовно усі кінема
тичні пари, що зустрічаються, з усіма можливими варіантами включення
(у квадратних дужках). При цьому передавальні відношення зубчастих
пар записують через числа зубів відповідних зубчастих колес;
- задають рух початковій ланці – швидкість двигуна (з розмірністю), а після
кіцевої пари ланцюгу через знак рівняння записують швидкість кінцевої
ланки у загальному виді, також з розмірністю (такий запис називається уза-
гальненим рівнянням кінематичного балансу ланцюгу головного руху;
- аналогічно попередньому, записують рівняння кінематичного балансу
ланцюгу подачі (для нашого випадку починаючи від шпинделю до рейки,
з урахуванням передавального відношення цієї кінематичної пари:
iР = π mРZР). Для наданої кінематичної схеми послідовно запишемо.
1. Ланцюг головного руху – обертання шпинделю з інструментом.
Початок ланцюгу – електродвигун; n ДВ = 1440 об/хв.
Кінець ланцюгу – шпиндель, nШП об/хв.
Рівняння розрахункових переміщень з урахуванням пружного ковзання
ременя на вході: n ДВ, об/хв. → nШП об/хв.
Рівняння кінематичного балансу:



|



|
1440 об/хв. •  • 0,985• •• == nШП об/хв.
• 0,985• •• == nШП об/хв.
2. Ланцюг подачі – переміщення інструменту на 1 оберт шпинделю.
Початок ланцюгу – шпиндель (колесо Z = 27).
Кінець ланцюгу – рейка (m Р = 3,5 мм).
Рівняння розрахункових переміщень: 1об.шп. → Sмм/об.




|
Рівняння кінематичного балансу:


|
1об.шп.• •• • •π•3,5• 14 ==Sмм/об.
•• • •π•3,5• 14 ==Sмм/об.
|
Мал.17.Кінематична схема вертикально-свердлувального верстату мод.2А135
|
|
|
Загальний вигляд кінематичної структури вертикально- свердлувального верстату буде мати такий вигляд (мал.18).
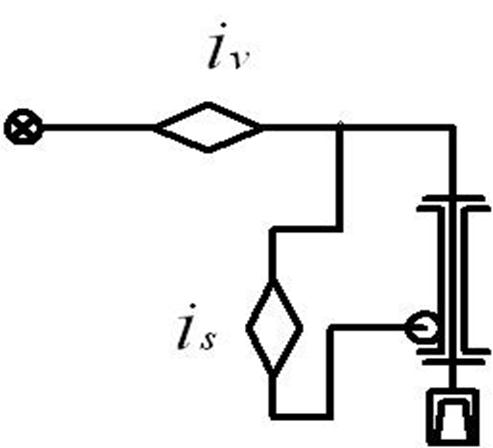
Мал.18. Кінематична структура вертикально–свердлувального верстату
Завдання на самостійну роботу:
- вивчити методику аналізу кінематичних схем верстатів;
- по альбому німих кінематичних схем знайти кінематичну схему
вертикально-свердлувального верстату мод.2Н135, скласти для нього рівняння розрахункових переміщень та кінематичного балансу для усіх ланцюгів КГФ.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 738; Нарушение авторских прав?; Мы поможем в написании вашей работы!