КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сертификационное испытание соответствия
|
|
|
|
M
Т
Т
Со
f(S) = a-Y^X';-{\-aY -F{S-n-V) (б)
Это уравнение по структуре аналогично уравнению (2), поэтому уравнение рабочего процесса планировщика с балансиром сзади, выраженное через амплитудно-частотную характеристику конструкции этого планировщика, будет иметь такой же вид, что и уравнение (4) для планировщика без балансира. Изменится только выражение для расчета AZX, которое в этом случае будет иметь вид
Jl-2-(l-a)-Cbs(—)-Cbs(~-f0 + (l -afCos1^)' U)
Аналогично получаются уравнения рабочего процесса для планировщиков с передним балансиром и планировщиков с передним и задним балансирами. Изменяются только выражения для расчета величины амплитудно-частотной характеристики. Так, для планировщика с передним балансиром (рис.16) имеем
AZX ' T—----------------- ^----------------- . (8)
1 - 2 • (1 - а) ■ Cos( ------ V) + (1 - a)2
V L
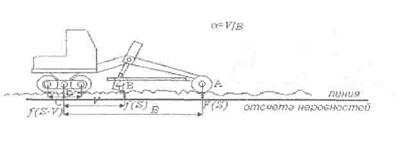
Рис.15. Расчетная схема для получения уравнения рабочего процесса воздействия на неровности планируемой поверхности автогрейдера с задней балаксирной подвеской
Для планировщика с передним и задним балансирами (рис.17)
a-Cos{)
А7Х = - ------------------ Л ------------------------
ll-2.{\~a)-CmA.Cos(^-V14l~a)2CoS\^-) ■ (9)
V L L L
"^~ и- рт ■ |_^--, ; " ь—— Z I U—U*——
f(S-V)* -- щ(Ю е!;w отсчета неровностей
'и-----------;- е------ *i
Рис, 18. Расчетная схема для получения уравнения рабочего процесса воздействия на неровности планируемой поверхности автогрейдера с передней балансирной подвеской
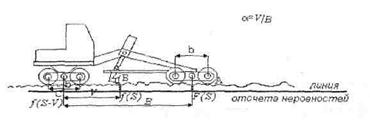
Рис.17. Расчетная схема для получения уравнения рабочего процесса воздействия на неровности планируемой поверхности автогрейдера с двумя балансирами
Определение требуемого числа проходов п при планировании земляного полотна.
Математическую модель неровностей исходного профиля планируемого рельефа местности можно представить в виде ряда Фурье
|
|
|
F(S) =*§jjAt- cos(k -(o-S-(pk)
где F(S) - величина неровности исходного профиля планируемой
поверхности относительно линии, определяющей макрорельеф
земляного полотна будущей дороги;
Ак - величина амплитуды k-v\ гармонической компоненты;
к - номер гармоник, на которые раскладывается исходный профиль
относительно линии макрорельефа местности;
(О - основная частота или основная гармоника исходного
— 2тг/ профиля рельефа местности, определяемая по формуле ® " /г,
где L - базовая длина участка макрорельефа местности, для которого определяется нормированная величина допустимой неровности [А]',
<Pfc- начальная фаза гармоники неровности к- й частоты, опреде-
'\_
ляемая по формуле ^* "" arcte~~, где bkv\ Эк - коэффициенты Фу-
ак
рье.
После первого прохода автогрейдера по исходному профилю полученный профиль рельефа местности определится при гармоническом синтезе всех его гармоник, параметры которых определяются из условия, что после прохода планировщика гармоники исходного профиля подавляются в разной степени в соответствии с их параметрами и параметрами конструкции автогрейдера. В таком случае рельеф местности после первого прохода определится выражением
FY{S) = 2., Azxk ■ Ак ■ Gps^ -(0-S--<pk -cpk)
где AZXic амплитудно-частотная характеристика конструкции автогрейдера по воздействию на к-ю гармонику исходного профиля, длина волны которой Ц~Ук; *
Ф^ - сдвиг фаз гармоники неровностей /(-ой частоты, определяемый только конструктивными параметрами автогрейдера.
Так, для планировщика без балансиров
(1 - а) ■ SinC7^-^ ■ V)
4 = -arctg ------------------------ -L---------
l-(l~a)-Co.(-~F) '
После второго прохода автогрейдера полученный профиль рельефа местности определится при гармоническом синтезе следующих гармоник:
F1{S) = YtAZX1k-Ak-w^k-(D-S-(pk-2-cp\)
к={
После n-го прохода
Fn(S) = Y.AZx:-A-cos(k-cD-S-<pk-n-<p;)
Согласно требованиям СНИПа контроль ровности земляного полотна осуществляется по значению амплитуд неровностей, максимальная из которых не должна превышать допустимую величину [А] для нормированной базовой длины участка микрорельефа местности. Процесс планировки местности необходимо завершать в том случае, когда неровности профиля Fn(S), полученные после п проходов автогрейдера по одному месту, будут менее допустимой величины. Это и есть условие определения необходимого количества проходов при планировке местности, которое в итоге определяет производительность автогрейдера при этой операции.
|
|
|
Для этого необходимо произвести синтез гармоник уравнения рабочего процесса после каждого прохода автогрейдера и сопоставить величины полученных максимальных неровностей Ап с допустимой неровностью [А]. Этот процесс необходимо повторить п раз до тех пор, пока величина неровности Ап не станет меньше допустимой. Осуществление этих операций при использовании ЭВМ не должно вызвать трудностей.
Для проверки вышеописанной методики расчета профиля планируемой поверхности после каждого прохода автогрейдера были произведены специальные опыты [3] в условиях строительства дороги. В процессе этих опытов производилась нивелировка профиля планируемой поверхности до и после каждого прохода автогрейдера ДЗ-122. В результате установлена удовлетворительная сходимость расчетных и экспериментальных данных, определяющих профиль планируемой поверхности.
В настоящее время информация о наиболее часто встречаемых исходных профилях планируемых поверхностей отсутствует. Необходимо специальное исследование, направленное на сбор и анализ информации с целью получения уравнения наиболее типичного исходного профиля обрабатываемых поверхностей различных строительных объектов. Эта работа позволит в дальнейшем разработать обоснованные рекомендации на совершенствование конструкции авто-грейдера и рациональные технологические приемы производства планировочных работ.
А пока оценку планирующей способности конструкции автогрейдера произведем из условия планировки поверхности, неровности которой описываются уравнением одной гармоники. В этом случае урав-
|
|
|
нение полученного профиля рельефа местности после п-го прохода автогрейдера будет иметь следующий частный вид:
Fn(S) = AZX"k-Ak-cos(k-co-S-n-<pl),
где а ~~ ^ - частота исходного профиля с длиной волны, равной L;
AZXic амплитудно-частотные характеристики конструкции автогрейдера для частоты изменения неровностей ю.
Согласно этому уравнению амплитуда неровностей после п проходов автогрейдера определится соотношением
Ап=Ак-А7Х1. Используя условие окончания планировки местности
An*[А], определим необходимое количество проходов автогрейдера для выравнивания неровностей одной гармоники
igU]-ig4t
п = —-—-----------------------
Ig AZXk
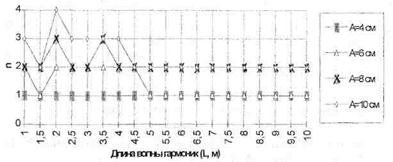
На рис. 18 представлен график зависимостей необходимого количества проходов автогрейдера при планировке местности, неровности которой описываются уравнением одной гармоники. Допускаемая неровность была принята [А]=3 см. При построении графика для определения амплитудно-частотных характеристик были использованы данные автогрейдера ДЗ-122 со следующими геометрическими параметрами: база 5,83 м; база заднего балансира 1,44 м; расстояние от оси заднего балансира до отвала 3,26 м.
Из анализа графиков следует, что для автогрейдера ДЗ-122 существуют наиболее неудобные неровности, сглаживание которых требует наибольшего количества проходов. Наибольшее количество проходов требуется при планировке местности с длиной волны неровностей в пределах 2,5...3,5 м. Для подавления неровностей исходного профиля с большими амплитудами требуется большее число проходов автогрейдера по одному месту.
Предлагаемая методика определения необходимого количества проходов автогрейдера при планировании неровностей позволяет оценить влияние параметров конструкции автогрейдера на его производительность при планировочных работах. На рис. 19 представлена зависимость необходимого количества проходов от места положения отвала, определяемого расстоянием его от оси заднего балансира - V. Из графика следует целесообразность применения устройств, обеспе-
чивающих размещение отвала как можно ближе к оси заднего балансира.
|
|
|
Необходима ког»гесгшгрскс10рв(п) гвг<тра%щза[&--\22прнггвнфэа<е неровностей равпт*ьк гэ=м*ис [ЛНЗ см
|
Рис. 18. Количество проходов (п) автогрейдера ДЗ-122, необходимое для планировки неровностей различных гармоник. Допустимая амплитуда [А]=3 см. При этом достигается уменьшение необходимого количества проходов автогрейдера по одном месту для достижения заданной неровности, что соответствует повышению производительности автогрейдера при планировочных работах.
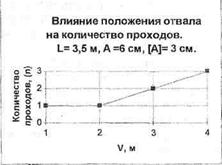
Рис. 19. Влияние расстояния между отвалом и задней осью V на количество проходов автогрейдера при планировочных работах.
На рис.20 представлен график, позволяющий оценить влияние колесного балансира на планирующую способность автогрейдера. Согласно этому графику лучшей планирующей способностью обладают
машины с передним расположением балансира и машины с двумя колесными балансирами (спереди и сзади). Применение заднего балансира позволяет значительно повысить производительность автогрейдера по отношению к машине без балансиров.
В»яниетгт»1в*«багвно^накат«есгаофа)1и» L=^5m, А=€ <щ Щ=3ал
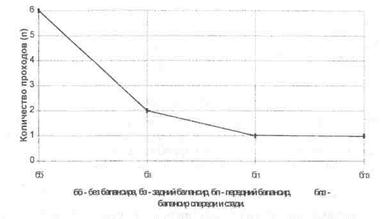
Рис. 20. Влияние местоположения балансиров на количество проходов автогрейдера при планировке
На рис.21 представлен анализ влияние базы колесного балансира на планирующую способность автогрейдера с задним расположением балансира, из которого следует целесообразность увеличения базы колесного балансира.
Современные автогрейдеры оснащаются шарнирно сочлененной рамой, что позволяет значительно уменьшить радиус его разворота. Помимо этого при такой конструкции автогрейдера обеспечивается возможность производства планировочных работ с установкой передних колес на спланированную поверхность, что обеспечивает значительное повышение производительности автогрейдера. В этом случае можно выполнять планировку поверхности за один проход.
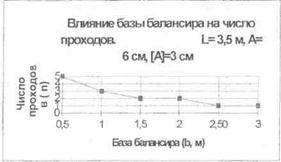
Рис. 21. Влияние базы колесного балансира на количество проходов автогрейдера при планировке
Задание для самостоятельной работы
На основе анализа информации о влиянии параметров автогрейдера и характеристики профиля местности на качество и производительность планировочных работ разработать методику сертификационного испытания автогрейдера заданной конструкции.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 429; Нарушение авторских прав?; Мы поможем в написании вашей работы!