КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лишние степени свободы, пассивные связи и их влияние на работоспособность машин
|
|
|
|
Классификация плоских механизмов
ЛЕКЦИЯ 2
В основу классификации механизмов положено требование единства методики кинематического и силового анализа механизмов. Этому требованию соответствует структурная классификация механизмов, разработанная профессором Л.В. Ассуром в 1916 году и получившая дальнейшее развитие в трудах академика И.И. Артоболевского. Основная идея Л.В. Ассура состоит в том, что любой плоский механизм может быть создан путем присоединения к начальному звену (или начальным звеньям) и стойке кинематических цепей нулевой подвижности, называемых структурными группами (группами Ассура).
По классификации И. И Артоболевского начальное звено и стойка, образующие кинематическую пару пятого класса, являются механизмом 1 -го класса (см. рис.1.9).
Группой Ассура называется кинематическая цепь, степень подвижности которой, после присоединения ее свободных элементов к стойке равна нулю при условии, что она не распадается на более простые группы Ассура.
На рис. 1.9 а, в представлены простейшие группы, состоящие из двух звеньев. Для них  , если свободные элементы присоединить к стойке (рис. 1.9 б). В этом случае группа превращается в ферму.
, если свободные элементы присоединить к стойке (рис. 1.9 б). В этом случае группа превращается в ферму.
|


Рис.1.9. Механизмы 1-го класса. Рис. 1.10. Простейшие группы Ассура.
Для групп Ассура характерно определенное соотношение между числом звеньев и кинематических пар для групп с парами только 5-го класса
 , т.е. n = 2 p 5 / 3.
, т.е. n = 2 p 5 / 3.
При этом n и p 5 – целые числа.
На рис. 1.11 представлены механизмы, образованные путем присоединением к механизму 1-го класса и стойке групп Ассура.

Рис. 1.11. Порядок образования механизмов
Контур – это линия, очерчивающая сложное звено или расположение звеньев в кинематической цепи. Количество кинематических пар в контуре определяет класс контура.
|
|
|
Класс группы Ассура определяется наивысшим по классу контуром, входящим в ее состав.
Порядок группы равен числу свободных элементов кинематических пар, которыми группа присоединяется к механизму.
На рис. 1.12 представлены группы Ассура различных классов. Звеньями этих групп образованны контуры:
в группе 2-го класса (рис.1.12, а) – контур АВ или ВС содержит 2 кинематические пары, следовательно, является контуром 2-го класса;
в группе 3-го класса (рис.1.12, б) – контур BCD 3-го класса;
в группе 4 -го класса (рис. 1.12, в) – контур BCEF 4 -го класса;
в группе 5-го класса (рис 1.12, г) можно отыскать два контура 5-го класса BCDEF и DGLNH, которые содержат по 5 кинематических пар.

Рис. 1.12. Группы Ассура 2-го... 5-го классов
Сочетание чисел n = 2 и р 5 = 3 характерно для структурных групп 2-го класса, сочетание n = 4, р 5 = 6 при наличии трех поводков и одного базисного звена – для групп 3-го класса.
В практике синтеза механизмов наибольшее распространение получили группы второго класса. В зависимости от числа и взаимного расположения вращательных и поступательных кинематических пар различают 5 видов структурных групп 2-го класса (см. табл. 1.3)
Таблица 1.3
Виды групп Ассура 2-го класса
| № вида | Схема группы | Вид и расположение пар | Пример образованных механизмов | Название механизма |

| Все пары вращательные | 
| Шарнирный четырехзвенник | |

| Две пары вращательные | 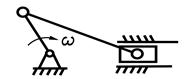
| Кривошипно-ползунный | |

| Две пары вращательные | 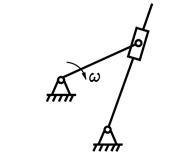
| Кулисный | |

| Две пары поступательные, одна вращательная | 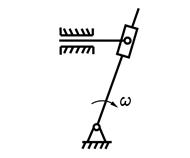
| Кулисно-ползунный (тангенсный) | |
| Две пары поступательные, одна вращательная | 
| Механизм двойного ползуна (синусный) |
Если результаты, полученные по структурным формулам, не соответствуют реальной степени подвижности механизма, то это может свидетельствовать о наличии в механизме лишних степеней свободы или пассивных связей.
|
|
|
Пример механизма с лишней степенями свободы представлен на рис. 1.13,а. На рис. 1.13,а показан сдвоенный параллелограмм, в схему которого введено дополнительное звено AB = CD. (ОА = BE, AC = CD).
По формуле Чебышева имеем:  .
.
В действительности степень подвижности механизма W =1, т.к. при заданном движении звена 1 остальные движутся вполне определенно. Дополнительное звено АВ в силу особого выбора размеров звеньев (фигуры ACDB и ОАВЕ являются параллелограммами) не налагается новых связей. Такие звенья и кинематические, которые они образуют, называют пассивными условиями связи.
На рис. 1.13,б показан механизм с пассивной связью. В этом механизме пассивной связью является звено 2.

Рис. 1.13. Кинематические схемы механизмов.
а) – рычажный механизм с пассивной связью; б) – кулачковый механизм с лишней степенью свободы.
У кулачкового механизма (рис.1.13,б) по формуле Чебышева  ,
,
хотя движение толкателя 3 полностью определяется движением кулачковой шайбы 1. Лишняя степень свободы появилась из-за возможности произвольного вращения ролика 2 вокруг своей оси. Она не влияет на кинематику толкателя. Введение в конструкцию ролика позволяет уменьшить трение в высшей кинематической паре, а, следовательно, и ее износ.
Избыточные связи могут возникать в плоских механизмах также из-за погрешностей изготовления и монтажа звеньев, приводящих к перекосам осей кинематических пар. При этом плоский механизм фактически превращается в пространственный. Количество избыточных связей в плоских механизмах, возникающих из-за перекоса осей равно
q = W ПЛ – W ПР,
где W ПЛ, W ПР – степени подвижности механизма, рассчитанные соответственно по формулам (1.1), (1.2).
Чем больше число избыточных связей q, тем менее надежно работает механизм.
Пусть плоский механизм с четырьмя вращательными парами (n =3, р 5 = 4, W ПЛ = 1, рис. 1.14,а) из за неточностей изготовления (например, вследствие непараллельности осей О и С) оказался пространственным. Для пространственного механизма W ПР = 6 х n – 5х р 5 = 6х3 – 5х4 = –2. Количество избыточных связей q = 1 – (–2) = 3. Для образования механизма без избыточных связей нужна другая структурная схема, например, изображенная на рис. 1.14,б, где n =3,
|
|
|
р 5 = 2, р 4 = 1, р 3 = 1, W ПР = 6 n – 5 р 4 – 4 р 5 – 3х р 3 = 6∙3 – 5∙2 – 4 – 3 = 1.
Рис. 1.14. К образованию механизма без избыточных связей.
а – механизм с избыточными связями; б – механизм без избыточных связей.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 3615; Нарушение авторских прав?; Мы поможем в написании вашей работы!