КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЛЕКЦИЯ 4. Две точки (Аx и А1) принадлежат двум звеньям – кулисе x-x и ползуну/1, и в данный момент времени совпадают (рис
|
|
|
|
Пример 2.
Две точки (Аx и А 1) принадлежат двум звеньям – кулисе x-x и ползуну/1, и в данный момент времени совпадают (рис. 2.9). Кулиса и ползун образуют поступательную кинематическую пару.
| 
| ||
| Рис. 2.9. | Скорости точек Ax направляющей и A 1 ползуна | Рис. 2.10. | План скоростей точек Ax направляющей и A 1 ползуна |
Скорость точки А 1, принадлежащей ползуну  будет складываться из двух скоростей – переносной
будет складываться из двух скоростей – переносной  , вместе с точкой Аx и относительной
, вместе с точкой Аx и относительной  . Векторное уравнение имеет вид:
. Векторное уравнение имеет вид:
 ,
,
где  – скорость точки Аx, принадлежащей направляющей (кулисе) x-x, совпадающий в данный момент времени с точкой А 1, принадлежащей ползуну (звено 1);
– скорость точки Аx, принадлежащей направляющей (кулисе) x-x, совпадающий в данный момент времени с точкой А 1, принадлежащей ползуну (звено 1);  – скорость ползуна относительно направляющей, направленная параллельно оси x-x.
– скорость ползуна относительно направляющей, направленная параллельно оси x-x.
План скоростей для этого случая представлен на рис. 2.10.
Ускорение точки А 1 ползуна, когда переносное движение является вращательным, складывается из трех составляющих: переносного  , т.е. ускорения точки Аx направляющей,
, т.е. ускорения точки Аx направляющей,  – Кориолисова (поворотного) точки ползуна А 1
– Кориолисова (поворотного) точки ползуна А 1
относительно направляющей Аx и  – относительного А 1 относительно/ Аx.
– относительного А 1 относительно/ Аx.
 .
.
Кориолисово ускорение вычисляется по формуле:
 ,
,
где ωx – угловая скорость направляющей (кулисы) x-x. Направление Кориолисова ускорения определим, повернув вектор относительной скорости  на 90° в направлении вращения направляющей, т.е. по направлению ωx.
на 90° в направлении вращения направляющей, т.е. по направлению ωx.
Вектор относительного ускорения  ползуна относительно направляющей направлен параллельно оси x-x.
ползуна относительно направляющей направлен параллельно оси x-x.
Векторы ускорений точек кулисы Аx и ползуна А 1 показаны на рис..2.11, план ускорений для этого случая изображен на рис..2.12.
| 
| ||
| Рис.2.11 | Ускорения точек направляющей Ax и ползуна A 1 | Рис.2.12 | План ускорений точек направляющей Ax и ползуна A 1 |
|
|
|
В частном случае, когда направляющая неподвижна,  ,
,  , и
, и  равны нулю и построение планов скоростей и ускорений значительно упрощается.
равны нулю и построение планов скоростей и ускорений значительно упрощается.
Построения планов скоростей и ускорений для групп Ассура 2-го класса 1-го…3-го видов представлены в табл. 2.1.
Таблица 2.1.
Планы скоростей и ускорений для групп Ассура и механизмов 2-го класса
Дано: 
| Дано: 
| ||||
| План группы 1-го вида | 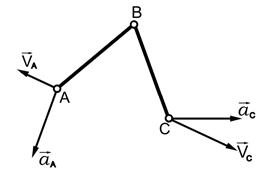
| План группы 2-го вида | 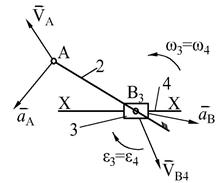
| ||
| Уравнения скоростей | Уравнения скоростей | ||||
  , ,  . .
 , ,  . .
|   , ,  . .
 , ,  . .
| ||||
| План скоростей | 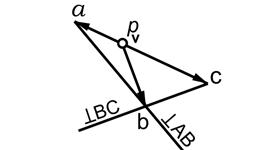
| План скоростей | 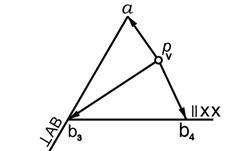
| ||
| Уравнения ускорений | Уравнения ускорений | ||||
  , ,
|  , ,

| ||||
| План ускорений | 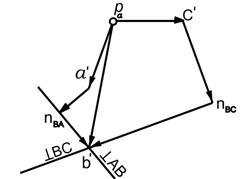
| План ускорений | 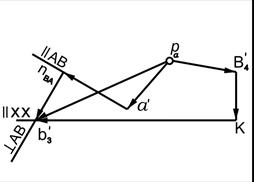
| ||
Продолжение таблицы 2.1
Дано: 
| Дано: 
| ||
| План группы 3-го вида | 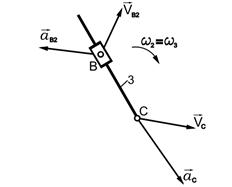
| План механизма | 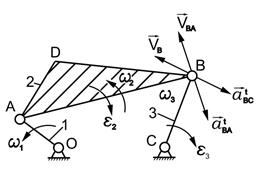
|
| Уравнения скоростей | Уравнения скоростей | ||
 , ,  . .
|   , ,  . .
 , ,  .
Используем подобие: .
Используем подобие: 
| ||
| План скоростей | 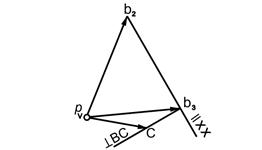
| План скоростей | 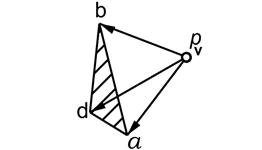
|
| Уравнения ускорений | Уравнения ускорений | ||
  , ,
|   , ,
 Используем подобие:
Используем подобие: 
| ||
| План ускорений | 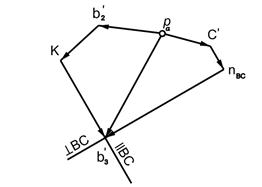
| План ускорений | 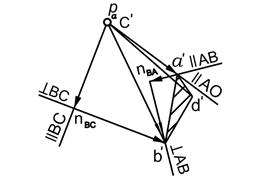
|
Окончание таблицы 2.1
| Дано:
| Дано:
| ||||
| План кривошипно-ползунного механизма | 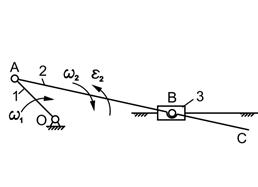
| План кулисного механизма | 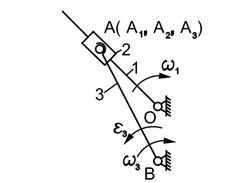
| ||
| Уравнения скоростей | Уравнения скоростей | ||||
 , ,
 , ,
 . .
|   , ,  . .
 , ,  . .
 . .
| ||||
| План скоростей | 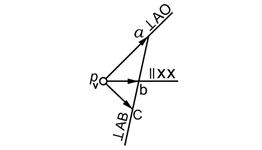
| План скоростей | 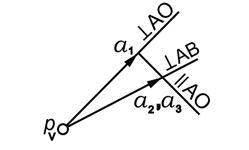
| ||
| Уравнения ускорений | Уравнения ускорений | ||||
  ; ;
 ; ;
  ; ;
 ; ;
 . .
|   ; ;
 . .
 ; ; 
 ; ;  ; ;  . .
| ||||
| План ускорений | 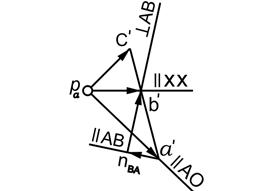
| План ускорений | 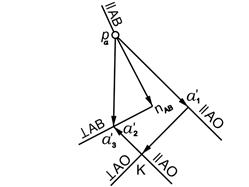
| ||
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 296; Нарушение авторских прав?; Мы поможем в написании вашей работы!