КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура і методи проектування
|
|
|
|
  
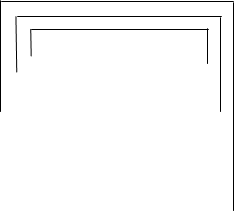
Мал.14.1. Загальна структурна схема послідовносного вузла. |





 z0 y0
z0 y0






 z1
z1


 y1
y1








 С zm-1 ym-1
С zm-1 ym-1

 х0
х0
 хn-1 Qk-1
хn-1 Qk-1

Загальна структура мікроелектронних послідовносних вузлів має вигляд, показаний на мал.1. Вона містить певну кількість запам’ятовуючих елементів (ЗЕ), керуючу комбінаційну схему (ККС) і вихідну комбінаційну схему (ВКС). На входи ККС надходять зовнішні сигнали Х = (х0, х1, …, хn-1), а також сигнали Y = (y0, y1, …, ym-1) з виходів елементів пам’яті. Виходи ККС (на мал.14.1 позначені Z = (z0, z1, …, zm-1)) надходять на входи ЗЕ. Виходи ЗЕ разом з Х також надходять на вхід ВКС, яка формує вихідні сигнали Q = (Q0, Q1, …, Qk-1). У синхронних вузлах застосовуються кола синхронізації С.
Стан послідовносного вузла визначається сукупністю станів усіх ЗЕ, тобто значеннями y0, y1, …, ym-1, які називають внутрішніми змінними. Перехід вузла із стану Y = Yt у стан Y = Yt+1 відбувається при надходженні керуючих сигналів Х. Внаслідок зворотніх зв’язків (зв’язків виходів зі входами) значення Yt+1 залежить не тільки від Х, а і від Yt: Yt+1 = F(Х, Yt).
Послідовносні вузли є схемною реалізацією скінчених автоматів. Якщо виходи вузла залежать як від внутрішніх змінних, так і від зовнішніх: Qt+1 = G(X,Yt), вузел називають автоматом Мілі. В тому разі, коли вихід повністю визначається внутрішніми змінними: Qt+1 = G(Yt+1), вузел називають автоматом Мура. У теорії скінчених автоматів доведена еквівалентність автоматів Мілі і Мура. Це означає, що будь-який послідовносний пристрій може бути реалізований як у вигляді автомату Мілі, так і у вигляді автомату Мура.
У окремому випадку автомат Мура може не містити ВКС і використовувати як вихідні змінні частину внутрішніх змінних. Прикладом такого автомату є тригер. Так само, як і для тригерів, для опису функціонування довільного послідовносного вузла застосовують таблиці станів та графи переходів, доповнюючи їх інформацією про значення вихідних змінних.
Проектування послідовносного вузла на основі тригерів складається з таких етапів.
1. 

 Складання таблиці станів або графу переходів і кодування станів вузла значеннями внутрішніх змінних Y. Якщо вузел має s станів, для їх кодування потрібно m = log2s внутрішніх змінних, тобто m тригерів. У якості усіх або частини внутрішніх змінних звичайно використовують вихідні сигнали вузла Qi = yj, оскільки при цьому спрощується або виявляється зовсім непотрібною ВКС. Значення внутрішніх змінних, які не є вихідними функціями, для кожного зі станів можуть вибиратися багатьма способами. При цьому набори значень внутрішніх змінних (двійкові коди), відповідаючі різним станам повинні відрізнятися. Визначення взаємно однозначної відповідності між станами та наборами значень внутрішніх змінних називається кодуванням станів.
Складання таблиці станів або графу переходів і кодування станів вузла значеннями внутрішніх змінних Y. Якщо вузел має s станів, для їх кодування потрібно m = log2s внутрішніх змінних, тобто m тригерів. У якості усіх або частини внутрішніх змінних звичайно використовують вихідні сигнали вузла Qi = yj, оскільки при цьому спрощується або виявляється зовсім непотрібною ВКС. Значення внутрішніх змінних, які не є вихідними функціями, для кожного зі станів можуть вибиратися багатьма способами. При цьому набори значень внутрішніх змінних (двійкові коди), відповідаючі різним станам повинні відрізнятися. Визначення взаємно однозначної відповідності між станами та наборами значень внутрішніх змінних називається кодуванням станів.
Кожний з варіантів кодування станів призводить до однієї з можливих логічних схем вузла. Доцільно використовувати той варіант, що дозволяє отримати схему з найкращими показниками.
2. Визначення функцій переходів для кожного тригера.
3. Вибір типів тригерів, отримання і мінімізація функцій їх входів.
4. Складання ККС.
5. Складання ВКС.
6. Визначення основних параметрів спроектованого вузла.
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 352; Нарушение авторских прав?; Мы поможем в написании вашей работы!