КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Установившееся движение электропривода
|
|
|
|
Установившееся движение ЭП обусловлено равенством моментов двигателя и рабочей машины  , в этом случае динамический момент будет равен нулю
, в этом случае динамический момент будет равен нулю  . Для исследования статического режима часто используют механические характеристики. Механические характеристики представляют зависимость сил или моментов от скорости движения.
. Для исследования статического режима часто используют механические характеристики. Механические характеристики представляют зависимость сил или моментов от скорости движения.
Механические характеристики рабочей машины обычно изображают в виде зависимости  (рис. 2.4). Каждая механическая система имеет свои характеристики. Но условно их можно разделить на четыре большие группы, которые объединяют большую часть применяемых на практике механизмов [13; 14].
(рис. 2.4). Каждая механическая система имеет свои характеристики. Но условно их можно разделить на четыре большие группы, которые объединяют большую часть применяемых на практике механизмов [13; 14].

Рис. 2.4. Механические характеристики рабочей машины
1 группа механизмов – момент сопротивления которых не зависит от скорости (кривая 1), например: лебедки, конвейеры с постоянной массой перемещаемого груза, механизмы подач некоторых металлорежущих станков.
2 группа механизмов – момент сопротивления которых зависит линейно от скорости (кривая 2), например: генератор постоянного тока независимого возбуждения при работе на постоянный резистор.
3 группа механизмов – имеет нелинейно-возрастающую (вентиляторную) характеристику, момент сопротивления пропорционален квадрату скорости  (кривая 3), например: вентиляторы, компрессоры, центробежные насосы и другие центробежные машины.
(кривая 3), например: вентиляторы, компрессоры, центробежные насосы и другие центробежные машины.
4 группа механизмов – имеет нелинейно-спадающую характеристику, момент сопротивления изменяется обратно пропорционально скорости, но не линейно. Обычно у этих механизмов мощность потребления остается постоянной (кривая 4), например, некоторые металлорежущие станки.
Механические характеристики двигателей изображают в виде зависимости  . Для большинства двигателей эта зависимость является убывающей функцией момента. Степень изменения скорости с изменением момента и характер изменения для различных двигателей различен. В зависимости от вида механической характеристики ЭД делят на четыре основные группы (рис. 2.5):
. Для большинства двигателей эта зависимость является убывающей функцией момента. Степень изменения скорости с изменением момента и характер изменения для различных двигателей различен. В зависимости от вида механической характеристики ЭД делят на четыре основные группы (рис. 2.5):
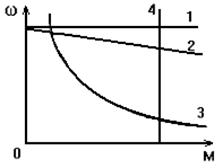
Рис. 2.5. Механические характеристики электродвигателей
1 группа двигателей – синхронные двигатели, скорость не изменяется при изменении момента (кривая 1). Характеристика абсолютно жесткая  .
.
2 группа двигателей – у этих двигателей скорость несколько снижается при увеличении момента (кривая 2). Характеристика жесткая. Такой характеристикой обладают двигатели постоянного тока с независимым и параллельным возбуждением и асинхронные двигатели на рабочем участке характеристики.
3 группа двигателей – скорость значительно изменяется с увеличением момента (кривая 3). Характеристика мягкая. Такой характеристикой обладают двигатели постоянного тока с последовательным возбуждением.
4 группа двигателей – характеристика абсолютно мягкая  . Такой характеристикой обладают двигатели постоянного тока с независимым возбуждением при их питании от источника тока либо в замкнутой системе при стабилизации тока якоря.
. Такой характеристикой обладают двигатели постоянного тока с независимым возбуждением при их питании от источника тока либо в замкнутой системе при стабилизации тока якоря.
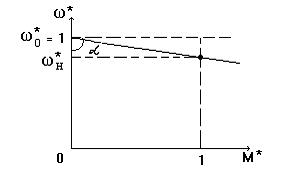
Рис. 2.6. Механическая характеристика
Для ЭД широко используют понятие жесткости механической характеристики:
 - для линейной характеристики, (2.12)
- для линейной характеристики, (2.12)
 - для нелинейной характеристики. (2.13)
- для нелинейной характеристики. (2.13)
Обычно механические характеристики двигателей имеют отрицательную жесткость. Понятие жесткости используют и для оценки механической характеристики РМ.
Для сопоставления различных двигателей используют понятие относительной жесткости. Если представить ω и М в относительных единицах (рис. 2.6), то получим
 ,
,  ,
,  - для ДПТ последовательного возбуждения.
- для ДПТ последовательного возбуждения.
Тогда  ,
,
 - относительная жесткость. (2.14)
- относительная жесткость. (2.14)
Если относительная жесткость механической характеристики больше 40, то характеристика абсолютно жесткая, если  - жесткая,
- жесткая,  - мягкая.
- мягкая.
Установившийся режим работы ЭП характеризуется равенством скоростей и моментов Д и РМ. Изображая характеристики двигателя (кривая 1, рис. 2.7) и рабочей машины (кривая 2), в первом квадранте найдем точку их пересечения.
 - точка пересечения характеристик соответствует установившемуся режиму системы. Под воздействием возмущающих факторов система может отклониться от установившегося режима, но если она статически устойчива, то после снятия возмущения она вновь вернется в прежнее состояние.
- точка пересечения характеристик соответствует установившемуся режиму системы. Под воздействием возмущающих факторов система может отклониться от установившегося режима, но если она статически устойчива, то после снятия возмущения она вновь вернется в прежнее состояние.
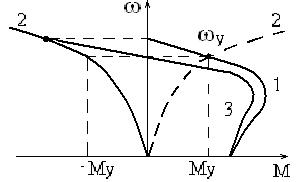
Рис. 2.7. Механические характеристики:
1-двигателя; 2- рабочей машины; 3- суммарная
Для того чтобы обеспечить статическую устойчивость, необходимо, чтобы при увеличении угловой скорости двигателя его момент оказался меньше момента сопротивления, а при уменьшении скорости больше момента сопротивления, тогда система будет сама возвращаться в положение равновесия. Понятие устойчивости обычно записывают через жесткость.
 условие должно выполняться в точке устойчивости и тогда система будет статически устойчивой (Критерий статической устойчивости),
условие должно выполняться в точке устойчивости и тогда система будет статически устойчивой (Критерий статической устойчивости),
где  - жесткость механической характеристики двигателя;
- жесткость механической характеристики двигателя;
 - жесткость механической характеристики рабочей машины.
- жесткость механической характеристики рабочей машины.
В тех случаях, когда устойчивость системы ЭД-РМ оценить сложно, строят суммарную характеристику ЭД и РМ (кривая 3, рис. 2.7). Если совместная механическая характеристика имеет отрицательную жесткость, то система устойчива.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 736; Нарушение авторских прав?; Мы поможем в написании вашей работы!