КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модели формы (типовые элементы), модели нагружения
|
|
|
|
Построение и классификация механизмов.
Различные сложные механизмы, предназначенные для преобразования движения входных звеньев в движение выходных звеньев, строятся путем соединения в кинематические пары отдельных звеньев.
Значительное количество возможных соединений звеньев вызывает необходимость классификации механизмов.
Асур Л. В. ввел понятие кинематической группы и разделил кинематические цепи на группы.
Кинематической группой называют плоскую кинематическую цепь, присоединение которой к другой к кинематической цепи не изменяет количества свобод движения этой цепи.
Предполагая, что любые кинематические пары могут быть приведены к простейшим, например, вращательным кинематическим парам, обозначим n – количество звеньев в кинематической группе,  - количество кинематических пар в группе. При плоском движении каждое свободное звено имеет три свободы движения (два поступательных и одно вращательное движение) и каждая кинематическая пара пятого класса отнимает две свободы движения. В соответствии с определением кинематической группы ее свобода движения должна быть равна нулю или
- количество кинематических пар в группе. При плоском движении каждое свободное звено имеет три свободы движения (два поступательных и одно вращательное движение) и каждая кинематическая пара пятого класса отнимает две свободы движения. В соответствии с определением кинематической группы ее свобода движения должна быть равна нулю или  , откуда
, откуда  (1). Количества кинематических пар n и звеньев отображаются целыми числами, поэтому равенству (1) соответствуют сочетания n=2,4,6… и =3,6,9. Следовательно, множество кинематических групп Асура определяется сочетаниями четного числа n звеньев и соответствующего
(1). Количества кинематических пар n и звеньев отображаются целыми числами, поэтому равенству (1) соответствуют сочетания n=2,4,6… и =3,6,9. Следовательно, множество кинематических групп Асура определяется сочетаниями четного числа n звеньев и соответствующего  числа кинематических пар 2-3, 4-6, 6-9 и т.д.
числа кинематических пар 2-3, 4-6, 6-9 и т.д.
Группы простейшие
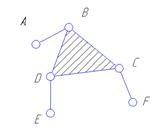 Звенья АВ, CF, DE со свободными элементами вращательных пар называют поводками, жесткое звено BDC называют центральными.
Звенья АВ, CF, DE со свободными элементами вращательных пар называют поводками, жесткое звено BDC называют центральными.
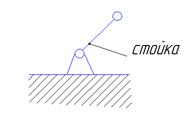
Кинематическую группу АВС называют двухповодковой или диадой. Двухповодковую группу, один из поводков которой закреплен (превращен в стойку), Асур назвал исходным механизмом первого порядка, каждую последующую группу Асура можно получить так называемым способом развития поводка, при котором поводок заменяется группой, состоящей из центрального звена с двумя поводками.


Классификация механизмов по Артоболевскому.
Механизм I класса
 исходный механизм
исходный механизм
Механизм II класса
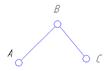 диада
диада
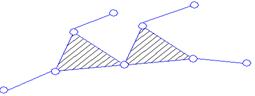
Механизм III класса
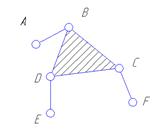
группа 4-6
(4 – число звеньев, 6 – числи кинематических пар)
Все кинематические группы, в которых не содержатся изменяемые замкнутые контуры, будут принадлежать к третьему классу. Если кинематическая группа имеет изменяемые замкнутые контуры, то их класс определяется количеством подвижных звеньев в замкнутом контуре. Порядок кинематической группы определяется количеством поводков, которыми группа присоединяется к другим кинематическим цепям. Механизму присваивается класс наивысшей по классу группы и порядок, соответствующий порядку старшей по классу группы.
Механизм IV класса
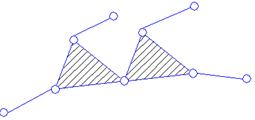 ее порядок равен 3.
ее порядок равен 3.
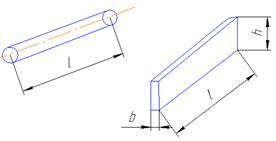
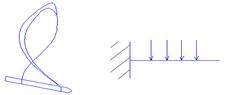
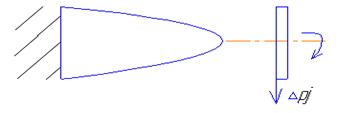
Модели формы:
Модель стержн я Модель пластины
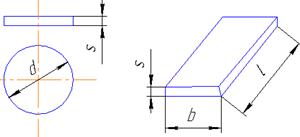
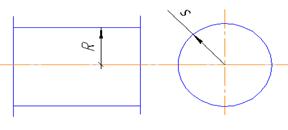
Оболочка
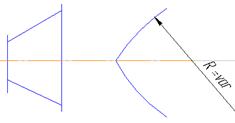
Твердые тела
Модели нагружения:
Нагрузка Распределенная нагрузка
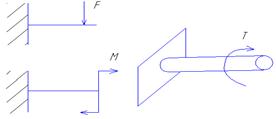
Объемное нагружение
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 349; Нарушение авторских прав?; Мы поможем в написании вашей работы!