КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Функциональные нелинейные законы управления
|
|
|
|
Общее понятие о нелинейных законах управления
НЕЛИНЕЙНЫЕ ЗАКОНЫ УПРАВЛЕНИЯ
Законы управления могут быть разбиты на классы. Е. П. Поповым введена следующая классификация нелинейных законов управления:
- функциональные нелинейные законы управления;
- логические нелинейные законы управления;
- оптимизирующие нелинейные законы управления;
- нелинейные законы наведения (параметрические нелинейные законы управления).
Важным отличием нелинейных законов от линейных является то, что они придают системе управления принципиально новые свойства. Если при линейном законе всегда используется сигнал, пропорциональный входной переменной или ее производной и т. д., то при нелинейном законе может существенно изменяться сам характер действия системы управления на объект в зависимости от величины входного воздействия. Другими словами, если для линейных систем изменение размера отклонения ‑ это изменение только масштаба, но не формы процессов, то в нелинейной системе при этом может существенно изменяться и форма процессов, вплоть до принципиальных качественных изменений картины процессов. Эти особые свойства нелинейных законов и следует максимально использовать в технике автоматического управления и регулирования.
Функциональными будем называть такие нелинейные законы управления, когда управляющее воздействие на объект выражается в виде нелинейной функции от отклонения управляемой величины, представляющей собой входную информацию для системы управления.
Данный класс может содержать в себе как статические, так и динамические нелинейности. Примеры статических нелинейностей в законе управления:
|
|
|
 ; (19.1)
; (19.1)
 . (19.2)
. (19.2)
Коэффициент усиления, измеряемый крутизной статической характеристики  соответственно будет:
соответственно будет:
 ; (19.3)
; (19.3)
 (19.4)
(19.4)
В случае (19.1), (19.3) (рис.19.1) будет более энергичное действие регулятора при больших отклонениях х и больший запас устойчивости установившегося режима, но зато меньшая точность в установившемся режиме. Возможна более сильная колебательность процесса вначале при неблагоприятных начальных условиях (рис. 19.1).
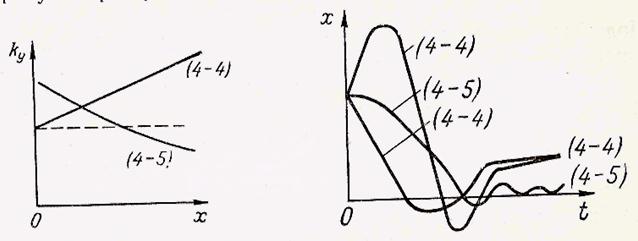
Рисунок 19.1.
В случаях (19.2), (19.4) будут менее энергичное, но более плавное действие регулятора и повышенная точность в установившемся режиме, хотя и с меньшим запасом устойчивости. Возможно даже появление установившихся автоколебаний (рис.19.1). Однако это зависит от общего сочетания параметров всей системы. Граница устойчивости, в этом случае, как правило, безопасная, в то время как в случаях (19.1), (19.3) ‑ опасная.
Приведенные рекомендации не всегда справедливы. В сложных многоконтурных системах эффект действия указанных нелинейных законов может быть совершенно иной. В каждом конкретном случае нужны специальные исследования.
Нелинейный закон управления за счет дополнительных нелинейных обратных связей может включать в себя также нелинейности, зависящие от выходной величины у:
Это расширяет возможности целесообразного изменения динамических свойств систем управления.
Примеры динамических нелинейностей в законе управления:
 ; (19.5)
; (19.5)
 ; (19.6)
; (19.6)
 (19.7)
(19.7)
Вместо двойного знака подразумевается какой-либо один из них.
Подобные динамические члены нелинейного закона управления различно влияют на демпфирующие свойства системы управления в переходных процессах в зависимости от размеров и скорости отклонения. Они же могут существенно улучшать динамическую точность системы в различных режимах вынужденного движения, воспроизведение различных форм задаваемых входных сигналов, а также при случайных воздействиях.
|
|
|
Изучение данного вопроса и накопление фактов легче всего производить путем моделирования процессов управления. Однако путь чистого моделирования не наилучший. Его нужно комбинировать с приближенными методами расчета, дающими в упрощенном виде в главных чертах качественную и количественную картину поведения системы при различных нелинейных законах управления. При расчете систем с нелинейными законами управления наиболее важными являются следующие задачи:
1) введение в систему специальных нелинейных корректирующих устройств для компенсации вредного влияния имеющихся в ней неизбежных нелинейностей типа зазоров, насыщения или других (т. е. исправлять «вредное плавание» частотных характеристик, рис. 19.2);
2) синтез нелинейных законов управления для получения заданных качеств работы различных систем управления, как для линейных, так и для нелинейных объектов различной структуры и назначения;
3) синтез нелинейных фильтров для борьбы с различными изменяющимися помехами, когда эффект действия их существенно зависит от величины амплитуды или среднеквадратического значения.
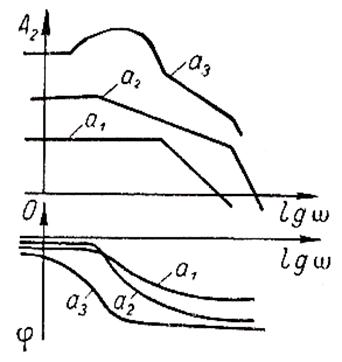
Рисунок 19.2
Отметим, что функциональные нелинейные законы управления могут быть связаны не только с изменением параметров в зависимости от размера входных воздействий, но и с изменением структуры. Например, при увеличении отклонения регулируемой величины сверх определенного порога в системе может происходить переключение с гибкой обратной связи на жесткую (рис. 19.3). Первая уменьшает ошибку системы в установившемся состоянии, вторая ускоряет затухание процесса при больших отклонениях. Аналогично могут создаваться нелинейные законы управления и по возмущению в комбинированных автоматических системах.
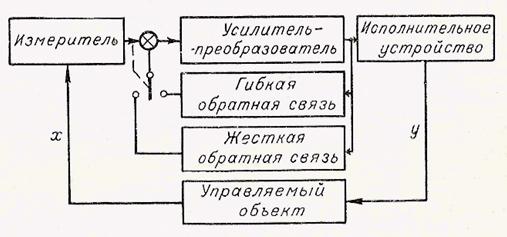
Рисунок 19.3
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 417; Нарушение авторских прав?; Мы поможем в написании вашей работы!